让埃隆・马斯克多次食言的自动驾驶,究竟会在什么时候来临?
最新的答案落在了不到 2 年后的 2027 年。在第二季度财报电话会上,理想汽车 CEO 李想认为,面向普通用户的 L4 级别自动驾驶将会在 2027 年实现。和李想持相同观点的业界大佬还有广汽集团董事长冯兴亚、引望智能驾驶产品线总裁李文广等等。
在近期举办的地平线技术生态大会上,地平线首席架构师苏菁也表示,三年后买到 “准 L4” 系统的车,是一个会高概率发生事情。
不过苏菁的发言有一些略显矛盾的地方。
曾经炮轰特斯拉 FSD 系统的他,在近期的几次发言中都肯定了特斯拉的表现和其对于行业的推动作用;在表达了近几年内智驾将有大发展、L4 落地有望的同时,苏菁又认为,这一代的深度学习技术,已经有点碰到天花板的感觉,在静待理论突破的过程中,智驾的开发将迎来 “苦日子”。

“AI 和 AGI 的基础理论在未来三到五年可能不会有全新的突破。” 苏菁这样说道。要知道自动驾驶一直被认为是人工智能或者通用人工智能落地的最佳载体之一,而在苏菁看来,现阶段自动驾驶的变革已经完成,智驾只能在现有基础上进行极致优化,再想要有过去几年那种重构式的进步,就只能等待理论的内核突破,但目前为止,还没有看到下一个理论突破的前置信号出现。同时,在理论突破后,可能还需要 5 年、10 年、20 年才能转化为应用的突破。
尽管各方都在畅谈着各级别智驾的落地时间表,但是在自动驾驶技术层面的障碍并未被完全扫除。
当前在智驾技术领域,大咖们时不时的 “嘴炮” 和赌局,都显示着智驾仍呈现多种技术路线齐头并进的态势,业界似乎并没有对自动驾驶技术的终极方向达成共识,百花齐放的背后显示了智驾或者自动驾驶距离成熟仍有很多难题需要攻克。
对于一种想象空间巨大的新兴技术而言,早期资本热捧、参与者众多是必然,随之而来的将会是不同玩家之间打造的大量看似能够走通的技术路线,技术会呈现出百花齐放的局面。
1900 年前后,人类开始摆脱畜力,尝试使用精妙的机械和非生物的能源来驱动 “没有马的马车”。在此期间,卡尔・本茨、费迪南・保时捷、阿尔芒・标致等一众巨擘共同使车辆实现了 “无马化”。但在诞生之初,汽车核心的动力来源并不完全是我们如今所熟知的汽油、柴油。

在那个时代,蒸汽机、木炭,乃至如今时兴的电池甚至混动系统都曾成为汽车动力的来源。但经过十数年的优胜劣汰,更加符合人类技术水平的内燃机汽车逐步取代了纯电、混动汽车成为主流,汽油和柴油也因此统治了随后 100 年的时间。
再比如我们如今所熟知的芯片,早前也存在晶体管和电子管的技术路线分歧,而在几十年的发展之后,性能更好的晶体管最终成为了主流,行业的研究方向也从路线争议转到了如何实现更高的制程和更好的性能,并最终成为当下我们生活的重要组成部分。
如今的智驾系统,就和 100 年前的汽车动力总成一样,作为新时代汽车的核心配置,智驾技术并未出现如同当时内燃机技术一统江山的状态。
今年 8 月,宇树科技创始人王兴兴对 VLA 模型表达了质疑,称VLA 是 “相对傻瓜的架构”;4 个月后,理想汽车自动驾驶研发高级副总裁郎咸朋在微博发表长文反驳,称VLA 是自动驾驶的最佳模型方案;在多家车企押宝的VLA外,华为、蔚来、商汤等则重仓了世界模型。
“我们不会走向 VLA 的路径。这样的路径看似取巧,其实并不是走向真正自动驾驶的路径。” 华为智能汽车解决方案 BU CEO 靳玉志就表示:“华为更看重 WA(世界行为模型),也就是 World Action,中间省掉 Language 这个环节…… 直接通过 Vision 这样的信息输入控车,而不是把各种各样的信息转成语言,再通过语言大模型来控制车。”

而同样应用 VLA 的小鹏汽车,则在今年 11 月的进博会期间称:“小鹏的二代 VLA 既是 VLA 模型,也是世界模型。”不少分析认为,小鹏的第二代VLA模型,去掉了L(语言),更像一个“VA(Vision Action)”模型。
小马智行CTO 楼天城则表示:“我了解大部分公司两种技术都用,比如 Waymo 也用了谷歌 Gemini 大语言模型。世界模型和 VLA 模型不是一个维度的东西,而是交错的。这两个东西不矛盾、不冲突,在机器人领域十分常见。我认为想要做百辆无人车以上的规模,世界模型最关键。对其他公司而言,可能做 VLA 模型卖车最关键。大家选择不同的路线是因为目标不同。”
仍有巨大争议的不仅仅是底座的架构模型,即便是感知方案,如今也没有一个相对统一的定论。小鹏汽车的 NGP 和 L4 Robotaxi 技术路线不使用激光雷达,但目前其视觉感知方案中仍配备毫米波雷达的辅助;而特斯拉无论是 FSD 还是 L4 Robotaxi 都采用了更加纯粹的 “纯视觉” 方案。
苏菁则认为,L4 自动驾驶可以采用乘用车和 Robotaxi 的双模式去部署,但目前地平线HSD系统量产的产品都采用了激光雷达,而非纯视觉;而以Waymo为代表的很多 L4 Robotaxi 公司,则在产品上搭载了十分豪华的传感器,应用了高精地图等技术,这种模式在商业普及上会遇到难题。
但 Waymo、小马智行等 L4 Robotaxi 公司仍旧坚持远比乘用车豪华的超多冗余硬件配置,在他们看来,当前的单一硬件都无法和人类感知媲美,只有多种不同类型传感器的相互冗余,才能实现最终的可靠和安全。

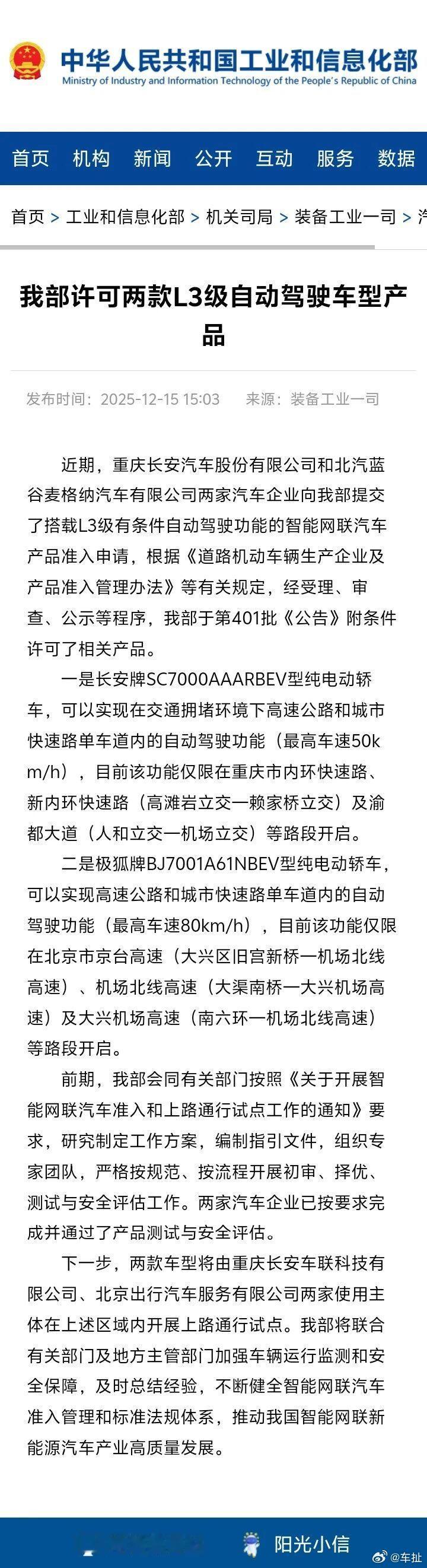
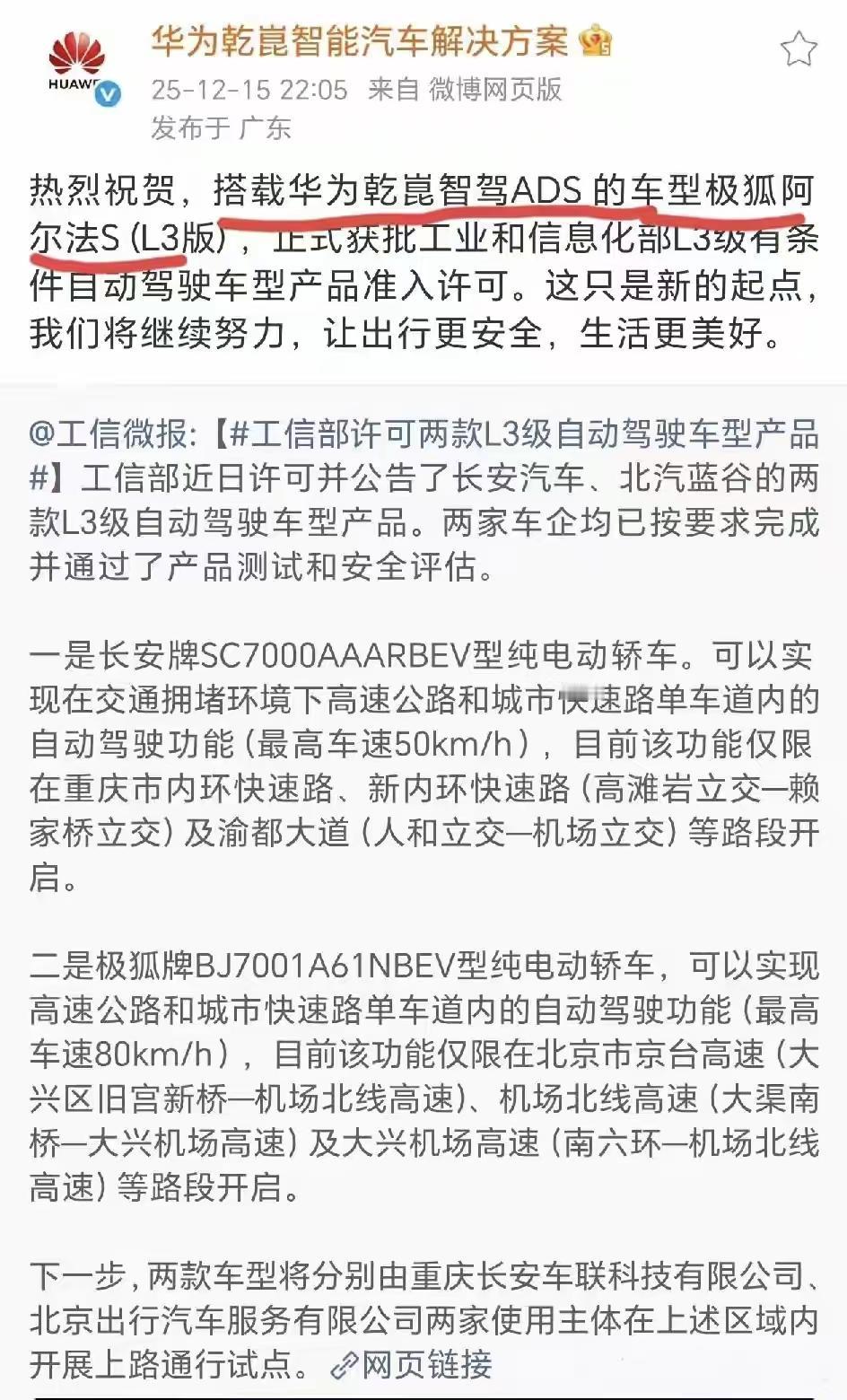
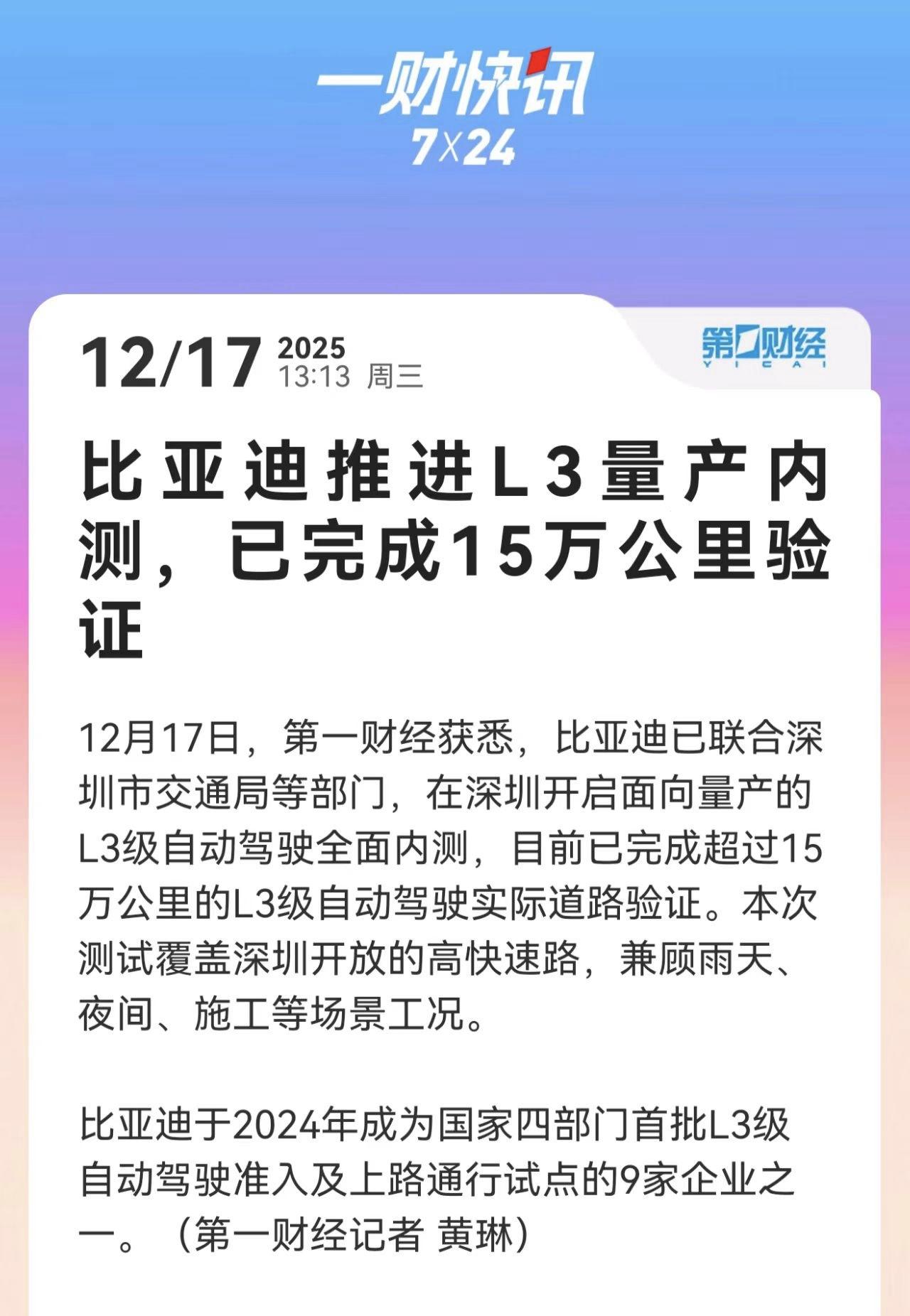
头部玩家的自动驾驶技术仍存在大相径庭式的差异,大规模普及和技术成熟可靠似乎缺乏了技术收敛这样的先决条件。不过随着玩家向头部集中,以及国家政策的推动和引导,智驾技术有希望更快实现成熟。12 月 15 日,工业和信息化部宣布,我国首批 L3 级有条件自动驾驶车型获得产品准入许可,自动驾驶迈出关键一步。
对于自动驾驶什么时候才能大规模普及,或许华为《智能世界 2035》中的预测更加贴切。这份报告分析认为,自动驾驶将于2027 年底开启 L4 级试商用,于 2030 年在部分场景实现 L4 规模化应用,并最终在 2035 年达成大部分场景的 L4 + 级无人驾驶,同时启动 L5 级的试商用探索。