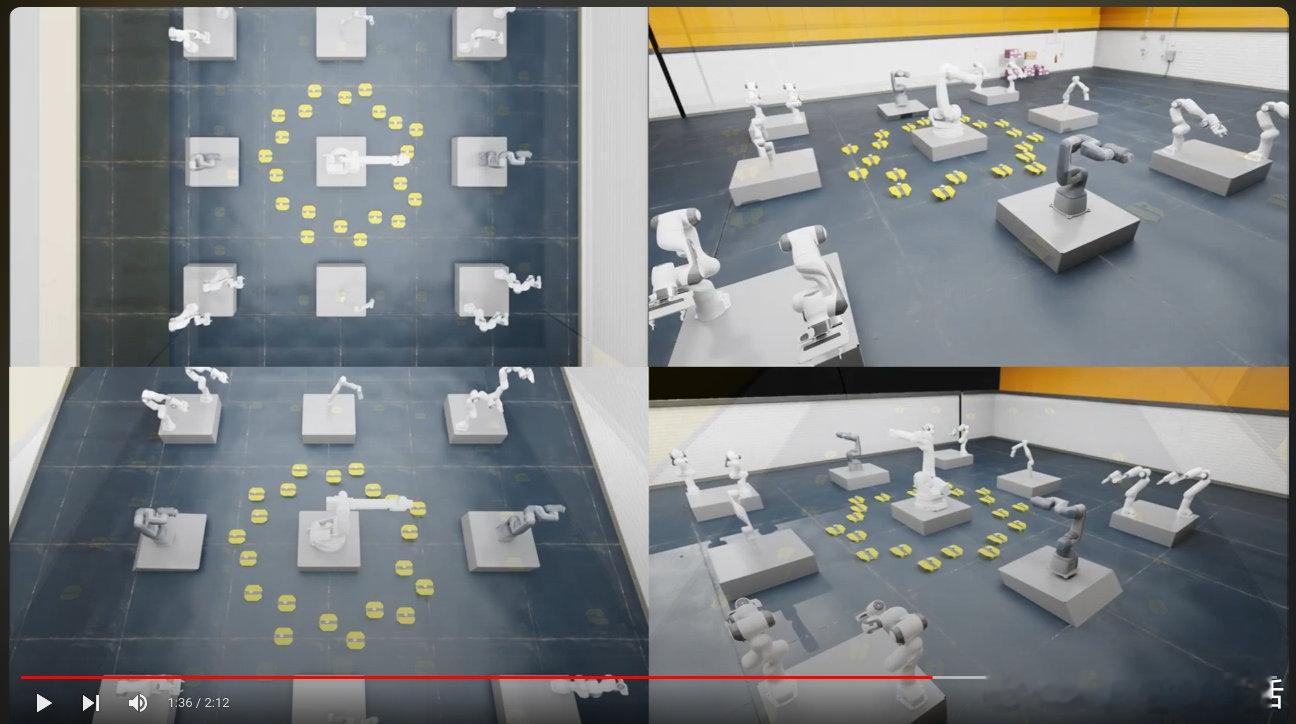
【yoraish/mmd:用扩散模型解决多机器人运动规划难题,让机器人团队协作更高效!亮点:1. 利用扩散模型生成复杂环境下的多机器人路径规划;2. 提供预训练模型和数据集,快速上手;3. 支持多种地图和场景,适应性强】
'Multi-Robot Motion Planning with Diffusion Models'
GitHub: github.com/yoraish/mmd
【yoraish/mmd:用扩散模型解决多机器人运动规划难题,让机器人团队协作更高效!亮点:1. 利用扩散模型生成复杂环境下的多机器人路径规划;2. 提供预训练模型和数据集,快速上手;3. 支持多种地图和场景,适应性强】
'Multi-Robot Motion Planning with Diffusion Models'
GitHub: github.com/yoraish/mmd
猜你喜欢


【11评论】【2点赞】

【10评论】【6点赞】




作者最新文章
热门分类
科技TOP
科技最新文章