今天我和烟烟去体验地平线的SuperDrive在上海市区的体验,这次正好遇到了上海超跑在浦西巡游,所以特别特别堵。
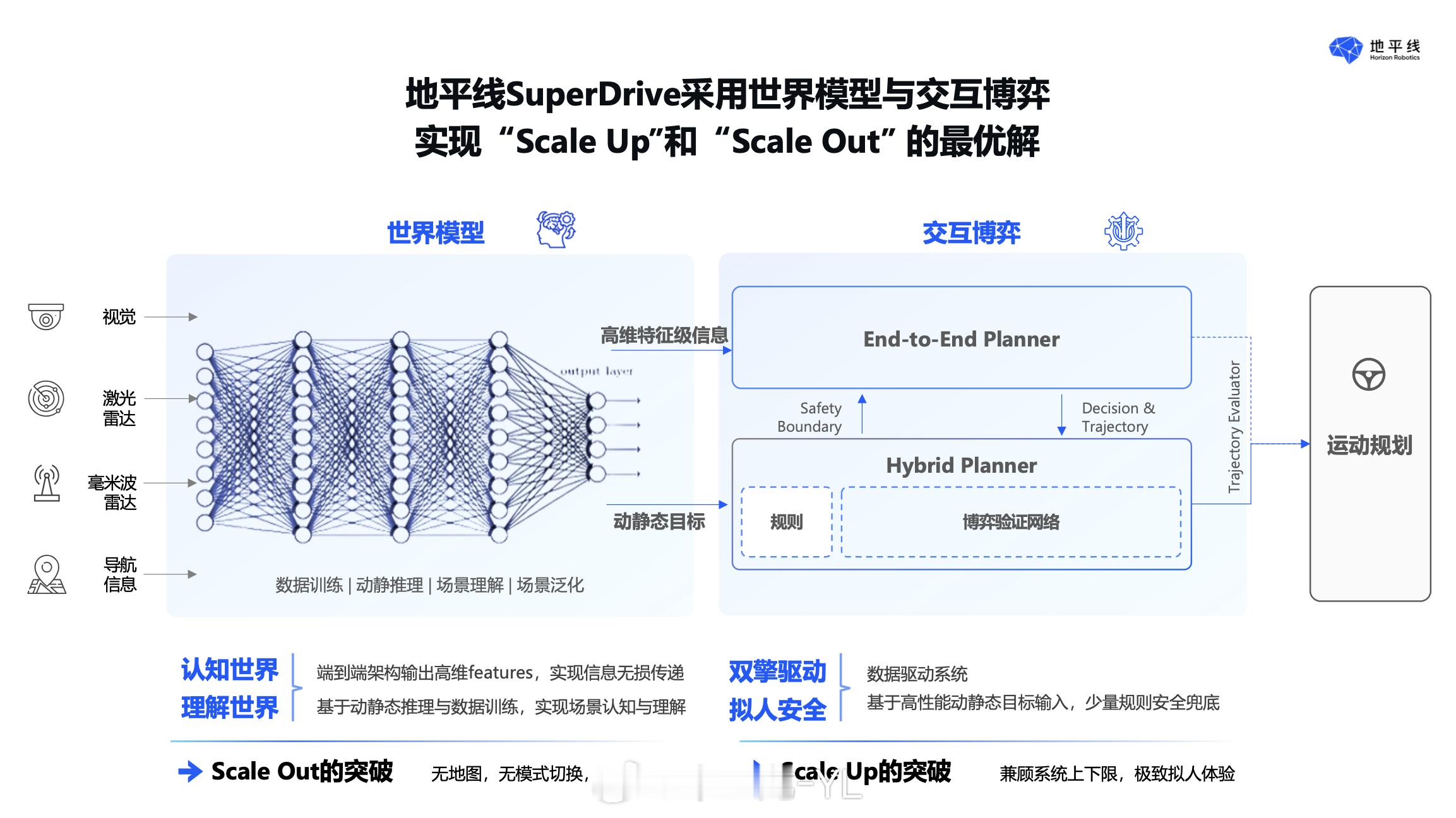
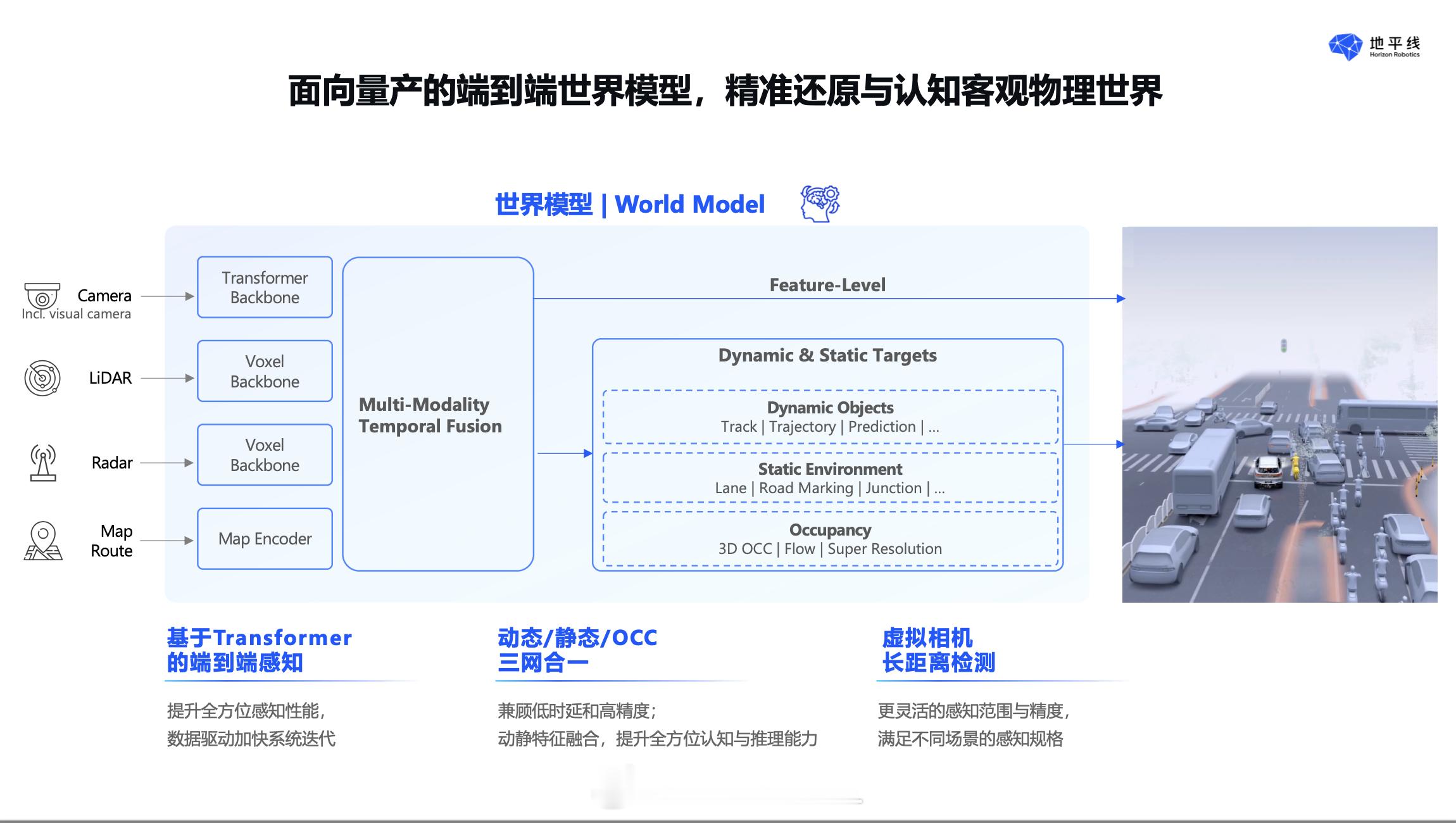
SuperDrive这块大模型驱动的 “端到端” 技术栈,前端以异构传感器与导航地图信息输入,经 “三网合一” 感知世界模型,向下游输出动静态目标信息用于 SR 显示与决策规划,决策规划含模型驱动和规则兜底两套系统
Lidar和毫米波做了前端的融合,试驾车使用大众的ID系列,激光雷达的处理使用前融合的处理方法,试驾车使用了J6M的方案(支持11V、5R、1L、12U的传感器接入),整体的效果由于有了一个高效的显示UI(通过lidar点云输入加入颜色渲染)交互感觉很好
我们今天尝试了不少的路况,总体评价是超期待的,录制的素材还在导出,后续烟烟和我会分别探讨一下这段试驾的过程中精彩的地方。