
2025小鹏科技日火了!豪赌“物理AI”的小鹏,展示了包括人形机器人在内的小鹏四大科技板块。而小鹏布局的四大赛道,其发展水平如何,在全球各领域范围内排位如何?今天为大家一一盘点。
11月5日,小鹏汽车以“涌现 Emergence”为主题具备了2025小鹏科技日,位置就在小鹏广州自己的园区里。
和大多数车企科技日不同的是,小鹏布局了很多汽车以外的赛道。这很像特斯拉,马斯克除了造车还玩火箭、玩卫星,造车更多作为现金基本盘,更大的目标都是造车以外。
小鹏把“第二代VLA大模型”当作操作系统,把Robotaxi、人形机器人IRON、以及飞行汽车两条产品线(陆地航母与A868)当作“具身载体”,并且给出了相对明确的量产/试运营时间表与合作方名单。
先把发布会要点讲清楚
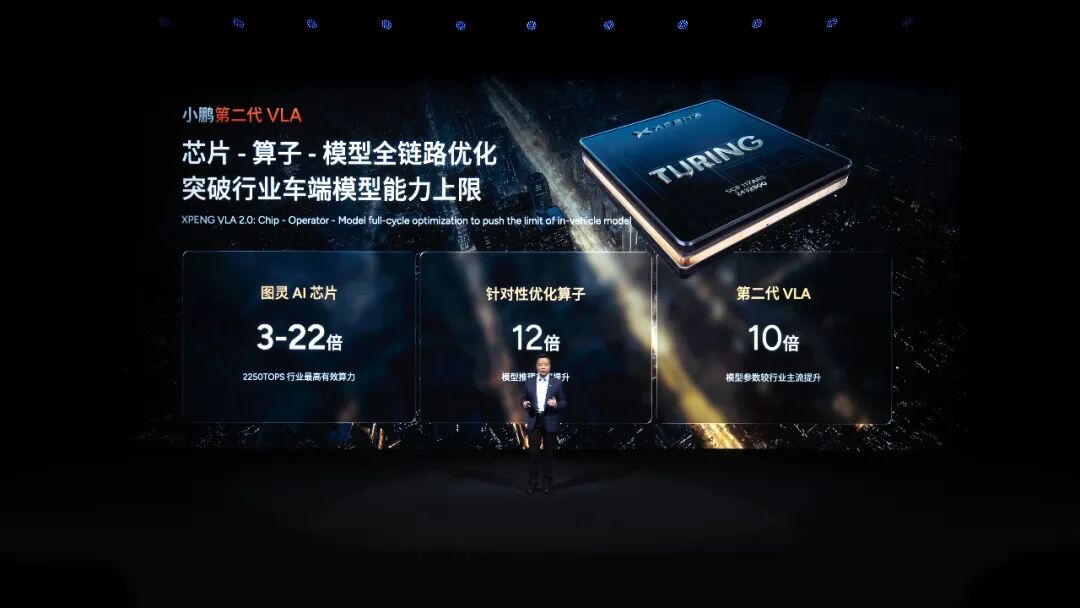
第二代VLA(Vision‑Language‑Action):这代模型直接从视觉到动作,去掉“语言转译”环节,目标是把车、Robotaxi、机器人、飞行器统一在同一套物理世界模型上。小鹏称其云端已跑到720亿参数基座、3万卡集群长期90%效率,车端在2250 TOPS的“Ultra”上跑“数十亿级参数”,并计划开放给全球伙伴。
Robotaxi:宣称全栈自研、纯视觉、无高精地图、无激光雷达,采用4颗“图灵AI芯片”3000 TOPS,2026年试运营;与高德结成首个生态合作,面向全球做服务网络。 另外,高德(Amap)也对外确认合作信息。
全新一代人形机器人 IRON:号称“最拟人”,82个自由度、22 DOF灵巧手、仿生脊椎与柔性皮肤,三颗图灵AI芯片2250 TOPS,提出“VLT+VLA+VLM大小脑”架构,并把2026年底作为规模量产目标;宝钢成生态伙伴。

飞行汽车两条线:“陆地航母”进入量产前夜,工厂试产首台飞行器并规划5000→10000台/年产能;“A868”走全倾转混电路线,目标500km航程/360km/h级别。其中陆地航母产线与首台下线也有行业媒体记录。
小鹏还宣布:大众成为第二代VLA与芯片首发战略伙伴;高德是Robotaxi首个生态伙伴;宝钢参与IRON生态。大众近一年来确实在中国加速本地化软硬件(含联合开发芯片与与小鹏扩展E/E架构合作),这为双方技术互通提供了现实基础

VLA 2.0:从“V‑L‑A”到“V→A”,这条路对不对?和特斯拉比如何?
VLA并非新造的词。谷歌/DeepMind 的 RT‑2 早就把“视觉‑语言‑动作”缝在一起,用互联网多模态知识迁移到机器人控制;Wayve 的 LINGO‑2 则把 VLA 带上真实道路,做成可以“边开边讲解”的闭环驾驶模型。
小鹏的第二代 VLA做的是从“V‑L‑A”到“V→A”:把中间的“语言转译”干脆拿掉,直接由视觉端到端生成动作,追求更低时延、更短工程链路。在云端,它宣称跑到720 亿参数基座、3 万卡集群且长期 90% 效率,并把五天一轮的全链路迭代当作目标;在车端,它把数十亿级参数模型塞进2250 TOPS平台,通过“芯片‑算子‑编译器‑模型”一体化做推理优化。这条思路与行业向集中式高算力演进一致——比如英伟达 DRIVE Thor 公开口径就是“最高 2000 TFLOPS/TOPS 级别、面向端到端与生成式工作负载”。

和特斯拉怎么比?
相同点:两家都把重心压到端到端“视频→控制”。特斯拉在 FSD v12 起,把城市道路栈换成端到端网络,“用数百万段视频训练、替代大量规则代码”;从 v12.5.6 起,高速场景也切到端到端,形成更彻底的一体化栈——但定位依旧是“FSD(Supervised)/L2 监督”,官方更新说明里不断强调“这不让车辆自动驾驶”。
不同点(更像“路线取舍”):
模型形态:小鹏明确主打“去语言转译”的 V→A,把动作完全交给端到端网络出;学界经典 VLA(RT‑2、LINGO‑2)多把动作“文本化”或用语言作中介来增强可解释性与可教性。特斯拉也走“视频→控制”的端到端,但未公开采用语言中介,其开发重点放在大规模视频样本学习与端到端控制。
训练/算力栈:小鹏高调公开“3 万卡 + 720 亿参数”与工程迭代节奏;特斯拉则在2025 年确认关停 Dojo 团队/项目、转向外部 GPU 与新一代自研芯片路线(AI5/AI6)——这等于从“自建训练超算”改为更务实的外采 GPU + 自研车端/数据中心芯片组合。

车端工程化:小鹏把数十亿级参数直接落到2250 TOPS平台,强调编译器与算子链路的车规化;特斯拉端侧以HW4为主推进端到端高速和城市路况,先在新硬件上铺开、再向增量机型回流优化。
生态开放:小鹏宣称第二代 VLA 将对外开放,并公开大众是首发伙伴;特斯拉的 FSD 依旧闭环自用。
这条路“对不对”看两件事
1)效果验证:官方给了几组“可用性指标”——例如复杂小路 MPI 提升 13 倍、可识别交警手势并提前应对红绿灯等。坦白说,这类指标缺统一公共基准,更像工程侧“拉通了”的证据,需要跨更多城市群/跨国路网去压测。特斯拉这边,端到端合一后高速与城市统一,体验上更自然,但也存在回归/波动的用户口碑波峰波谷。
2)可扩展与开放性:小鹏把 VLA 对外开放、携手大众,等于是把“车企自用模型”变成“物理世界操作系统”的尝试;若真能把同一套模型跨车、跨 Robotaxi、跨机器人/飞行器跑顺,生态效应会很大。对比特斯拉,闭环体系带来更强的节奏掌控,但对外赋能和跨行业迁移空间小一些。

个人主观判断:
在“大模型 → 具身智能”的行业共识下,小鹏的 V→A 路线是更彻底的端到端版本,时延与工程链路占优,但可解释性/安全证据需要更长时间沉淀;特斯拉的强项是车队规模与全球真实驾驶数据,端到端扩到高速后统一栈的收益开始显现,但仍处 L2 监督、还要面对跨国法规与责任边界。就“乘用车端到端量产落地”这个细分口径看,小鹏已在国内第一梯队;若年底的先锋用户共创把跨城泛化跑实,再叠加其对外开放与多载体统一,它有机会在“模型定义出行”这条赛道上形成差异化的第二增长曲线。
Robotaxi:2026年“上路”,放到全球版图里是什么水平?
小鹏版Robotaxi:纯视觉、无高精地图、3000 TOPS冗余、面向L4,2026年试运营;高德成为首个生态合作方(相当于把“叫车入口”和“地理生态”先铺好)。
横向对比:
Waymo:多城付费载客稳定运营,近一年持续扩区,是今天商业化天花板;其自报每周5万+付费行程,并在加州多地新增覆盖。
Cruise:2023年事故后在美收缩/停摆,今年主要做人驾/软复飞,Origin停工,重心转回L2+/个人化方向。放到“商业化成熟度”榜,已从第一梯队掉出。
中国阵营:百度Apollo Go在武汉形成超大无安全员运营区、加速出海(与Uber等合作),累计里程/单量领跑中国;文远知行(WeRide)获北京核心城区商业化资质并建24/7线路网;小马智行(Pony.ai)公布千台级扩张与盈利时间表。
商业化成熟度比较(100分制,媒体观察指标):
Waymo 90(跨城运营+扩区节奏稳)
Baidu Apollo Go 80(大规模无安全员+城域范围大)
WeRide 72(北京核心区商业化+24/7网)
Pony.ai 68(扩张与盈利路径清晰)
Cruise 30(暂停/重启中的不确定性高)
注:该指数按“规模(40%)/监管许可(25%)/扩张势头(20%)/技术自研度(15%)”主观加权,仅供横向参照。
小鹏要补的课:一是泛化验证(纯视觉去海外要跨路权/路规/文化差异),二是安全冗余(视觉冗余在极端天气/污染下的退化策略),三是运营闭环(高德生态能解决获客,但车队调度/维护是硬活)。短期我更看重它推出的“Robo”个人化L4体验,这是成本更友好的折中形态。
IRON:高度“拟人”≠马上“能干活”,行业排位更看“落地密度”
小鹏IRON新一代把拟人做到了极致:82 DOF全身、22 DOF灵巧手、仿人脊椎+柔性皮肤,全固态电池尝鲜、2250 TOPS算力,并宣称用“VLT+VLA+VLM”做“大小脑”,2026年底要实现规模量产。首批商用场景从导览/导购/巡检起步,且落到宝钢场景共创。
行业参照:
Agility Robotics:美国已开RoboFab,公司称2025年交付“数百台”,与Amazon/GXO等在仓储持续试点,是“工业落地密度”最高的一类。
UBTech Walker S/S2:强调工厂协作/可自行换电能力,国内工程化与订单推进较快。
Figure AI:与BMW签商业协议,斯巴达堡工厂持续验证,资本与关注度高,但仍处快速迭代阶段。
Tesla Optimus:视频与实验室演示增多,雄心是2025年起量,但对“规模交付”依然谨慎。
人形机器人产业落地温度比较(100分制,媒体观察指标):
Agility Robotics 78(仓储场景最具体、出货预期清晰)
UBTech 65(工业协作方向明确,国内项目推进快)
Figure AI 60(车企工厂验证+资本强势)
Tesla Optimus 55(研发节奏快,量产与场景仍在寻找平衡)
Xpeng IRON 45(拟人程度高、算法架构先进;2026量产仍需时间验证供应链与成本)
一句话评价:小鹏把“拟人极限”与“汽车同源AI栈”结合,技术路线是对的,但要在工业场景“真干活”,还得在驱动/减速器/材料/热管理和批量一致性上啃硬骨头。
飞行汽车:陆地航母冲量产,A868走“全倾转”,放进全球eVTOL坐标系
陆地航母:广州工厂试产首台飞行体、年产5000→10000台的节拍设计,海外订单/试飞信息不断;A868瞄准高速长航程全倾转,用混电内核解决能源密度与续航焦虑。小鹏汇天还披露文旅线路试点(敦煌)。

行业参照:
亿航:EH216‑S拿到适航/生产证,国内率先形成“拿证→交付→商业化”闭环;在监管维度占优。
Joby/Archer(美国):FAA 取证进入后期节点,2025‑26启动载客试运营被多方反复提及。
Volocopter(欧洲):巴黎奥运会期间未能如期“飞天”,说明欧盟取证/城市噪声的现实难度。
低空出行推进力”比较(100分制):
EHang 85(中国拿证+落地速度快)
Joby 70 / Archer 65(北美取证稳步推进)
Volocopter 50(示范飞多,证难下)
Xpeng AeroHT 50(量产工厂起线是里程碑,适航/运营规则仍是下一关)
芯片与生态:为什么“自研芯片+对外合作”是关键一环?
小鹏这次反复强调从“芯片‑算子‑编译器‑模型”做全链路打通,理由很直接:端到端/大模型往往“吃延迟、吃带宽、吃功耗”。而行业硬件主流也在走集中式高算力,例如NVIDIA DRIVE Thor对外标称2000 TOPS,国内外多家车企从Orin向Thor迁移。小鹏若真把车端数十亿参数跑顺,芯片栈就是“护城河”的一半。
另一方面,大众在华加速本地化芯片与E/E架构合作,和小鹏结成“模型/芯片首发”伙伴,意味双方技术路线更贴合,对后续规模化验证与出海都加分。
把位置排出来:四个项目的“赛道名片”
VLA 2.0(模型层):与RT‑2/LINGO‑2/特斯拉E2E同趋势,强调时延与工程化。若按“端到端量产落地(乘用车)”这个小维度,小鹏进入国内第一梯队,但要在跨城/跨国泛化上拿硬数据。
Robotaxi(系统层):2026试运营在时间轴上并不激进;全球头部仍是Waymo,中国是百度/文远/小马分列梯队。小鹏靠“纯视觉+高德生态”走差异化,短期以“Robo”个人化L4体验”为更务实抓手。
IRON(具身层):拟人程度与算法架构在线,但工业落地密度目前落后于Agility/UBTech等“先把简单重复工序啃下来”的派别;2026量产目标值得跟踪。
飞行汽车(空域层):陆地航母拿到了工厂节拍的先手;若要和全球eVTOL对齐,还需在适航/运营试点上补课。A868的“全倾转+混电”路线很“航空”,但这部分的工程与合规难度与车企业务完全不同。

我最关心的三件事(或许也是决定成败的三道坎)
1. 成本/能效:VLA 2.0+端到端让车端算力、存储、带宽一起上台阶,如何在Ultra之外向更低价位下探,是“智驾普惠”的关键。对标看,Thor/Orin体系也同样面临单位算力的性价比瓶颈。
2. 安全与监管:Robotaxi与eVTOL都离不开分阶段许可与运营闭环。Waymo靠多年城市运营数据与透明安全报告积累口碑;亿航靠适航+生产证跑通“先飞起来”的路径。小鹏要走的,是监管协同+场景分级的耐心活。
3. 供应链与规模一致性:人形机器人与飞行器都不是“只靠算法”的生意,精密传动/材料/电池的一致性与可维护性最终决定能否从Demo走向队列化。这方面,与宝钢的工业巡检共创是一个务实入口。

结语:这不是一场“广告发布会”,而是一次“押注物理AI”的集体亮相
把车、的士、机器人、飞行器放到同一张“物理AI”底图上,路线上的一致性我认可;节奏上的难度我也看得清:Robotaxi 与 eVTOL 的监管/运营是长期战,机器人是工艺/成本的硬仗,VLA 2.0 要拿“跨域一致性”的真成绩。
但如果你问我小鹏此刻到底“排在什么位置”:VLA 2.0 的工程化与开放姿态,让它在“模型定义出行”这条路上站上了牌桌;Robotaxi 与 IRON、飞行汽车,则分别处在“追赶头部”“加速试点”“量产上线”的不同阶段。这套组合拳,至少是清晰且可被验证的。
文|非蓝