
论文信息
英文题目: Implementation and stability evaluation of a mobile cable-driven vertical surface spraying robot
中文题目: 移动缆索驱动垂直面喷涂机器人的实现与稳定性评估
作者: Zitai Feng, Bin Zi, Jiahao Zhao, Yuanyi Fan
作者单位: 合肥工业大学、西安电子科技大学
期刊:Mechanism and Machine Theory(IF 5.3 中科院一区,JCR一区)
发表时间: 2025年10月
链接:https://doi.org/10.1016/j.mechmachtheory.2025.106178
引文格式:Feng Z, Zi B, Zhao J, et al. Implementation and stability evaluation of a mobile cable-driven vertical surface spraying robot[J]. Mechanism and Machine Theory, 2025, 215: 106178.
01 全文速览大型垂直表面喷涂——比如船体、飞机蒙皮、建筑外墙——一直是个难题。传统机械臂够不着,人工喷涂不安全,固定式缆索机器人又只能覆盖有限区域。合肥工业大学和西安电子科技大学团队这次提出的移动缆索驱动喷涂机器人(MCDSR),把两个移动底盘和八个缆索结合起来,让机器人能在垂直面上边移动边喷涂。
但问题来了:移动底盘在垂直面上工作时,缆索的拉力随时可能让底盘翻倒或打滑。他们为此定义了一个移动稳定性指数(MSI),把“会不会翻”和“会不会滑”量化成一个0到1之间的数。然后把这个指数作为约束,加到缆索机器人的工作空间求解里,只保留那些能让底盘站稳的位姿。
仿真结果显示,在不同构型下,稳定工作空间的体积可以增长20倍,MSI始终保持在0.9以上。实验原型在垂直曲面上跑了预设轨迹,平均跟踪误差小于8毫米,八根缆索的长度误差在0.5毫米量级。喷涂实验的漆膜图案与设计目标基本吻合。
核心亮点:✅移动+缆索:两个麦克纳姆轮底盘+八个缆索,实现大范围垂直面喷涂
✅可重构设计:锚点高度可调(0.7-1.5米),底盘间距可调(1-3米)
✅稳定性指数MSI:同时量化倾覆和打滑风险,实时监测底盘状态
✅稳定性约束工作空间:只保留MSI达标的位姿,避免理论解包含不稳定点
✅实机验证:垂直曲面轨迹跟踪误差<8毫米,喷涂效果达标
02 研究内容🤖机器人设计:两个底盘,八根缆索
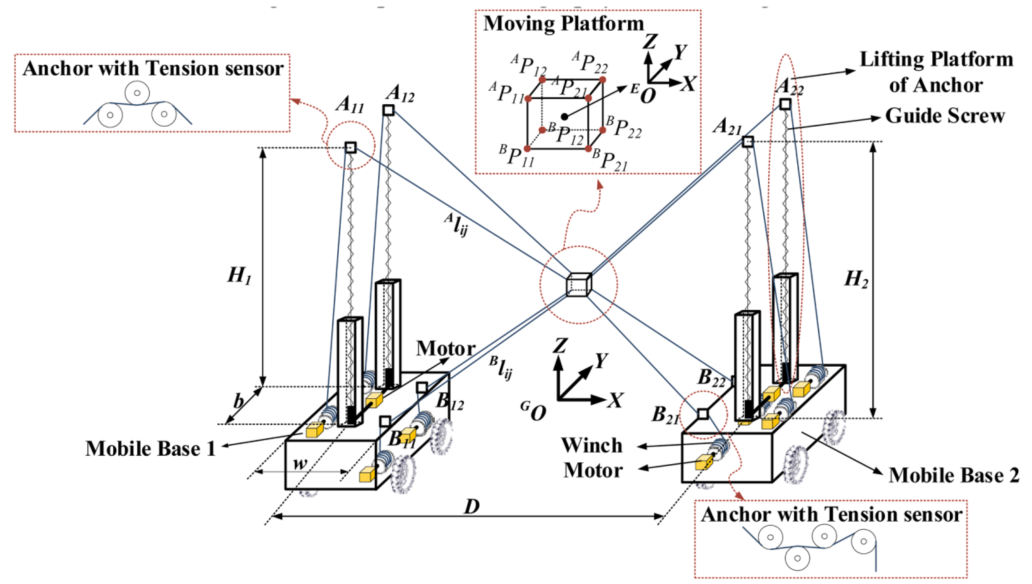
Figure 3:移动缆索驱动喷涂机器人结构示意图
图3展示了MCDSR的整体结构。两个移动底盘(MB)各装四个麦克纳姆轮,可以在平面上自由移动。每个底盘上有两个可升降的上锚点(A₁₁、A₁₂、A₂₁、A₂₂)和两个固定高度的下锚点(B₁₁、B₁₂、B₂₁、B₂₂)。八根缆索从这些锚点连接到末端执行器(MP)的八个顶点,实现六自由度运动。
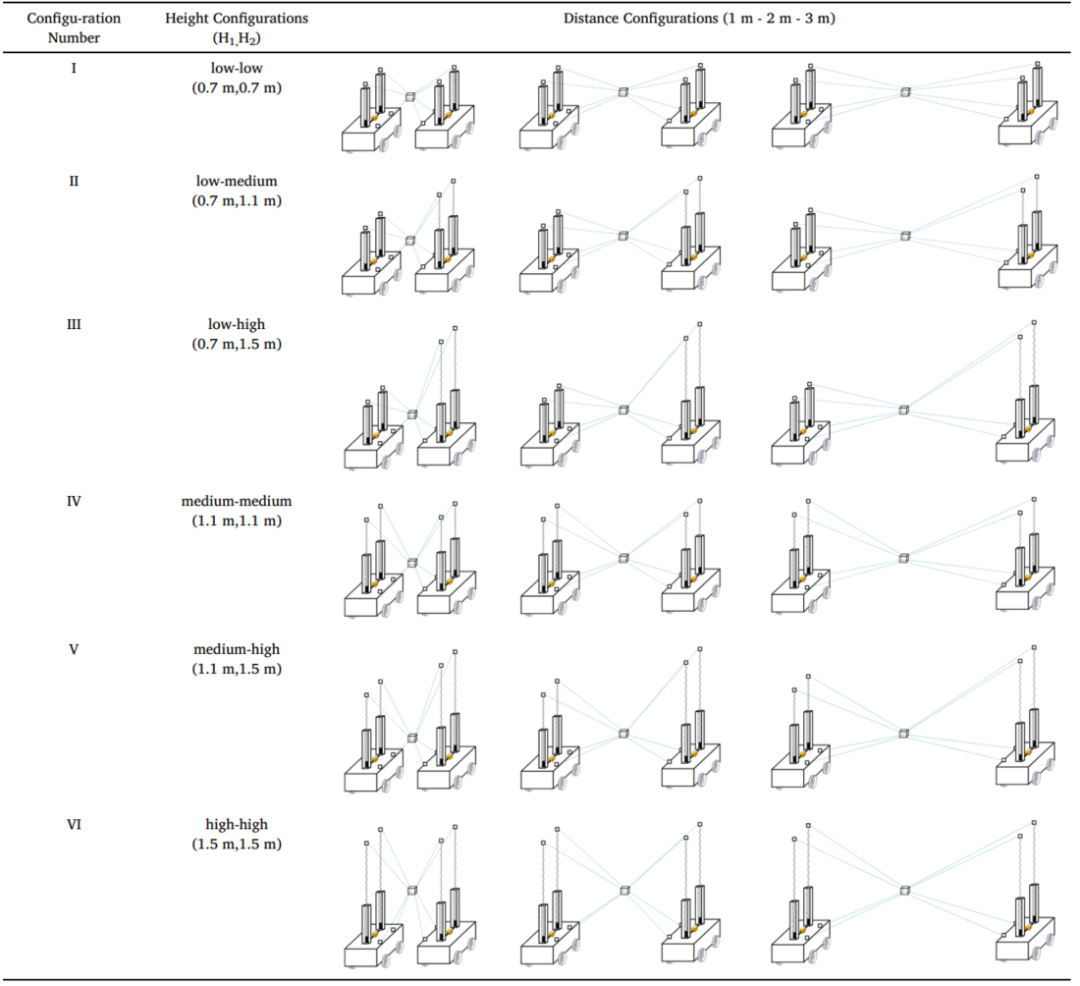
锚点高度可调(0.7-1.5米),底盘间距可调(1-3米)。表1列出了18种组合构型。
Table 1:可重构策略表
📐运动学与动力学模型
缆索长度与MP位姿的关系:

其中是底盘的移动量,是锚点升降量。缆索速度与MP速度的关系:

动力学方程(力平衡):


力矩平衡类似,略。
⚖️ 稳定性分析:什么时候会翻?什么时候会滑?

Figure 7:动底座受力分析图。 (a) 作用在移动基座上的外力图。 (b) 作用在移动基座麦克纳姆轮底盘上的接触力图。
图7a是底盘受力分析,包括缆索拉力、自重、地面对轮子的接触力。图7b是麦克纳姆轮的接触力示意。
倾覆条件用ZMP(零力矩点)判断。ZMP是地面反力的等效作用点,如果它落在底盘轮廓之外,底盘就会翻倒。力矩条件:

打滑条件用摩擦锥判断。地面反力必须在摩擦锥内,线性化后:

📊移动稳定性指数MSI
定义两个子指数:
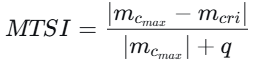
- MTSI(倾覆稳定性):基于最大倾覆力矩与临界值的差
- MSSI(打滑稳定性):基于最大剪切力与临界值的差
总MSI取两者较小值:

MSI在0到1之间,越接近1越稳定。实验中所有点的MSI都大于0.918,说明设计合理。
🗺️ 稳定性约束下的工作空间
常规的力可行工作空间(WFW)只考虑缆索张力范围(5-300 N)和静力平衡。他们把MSI条件也加进去:


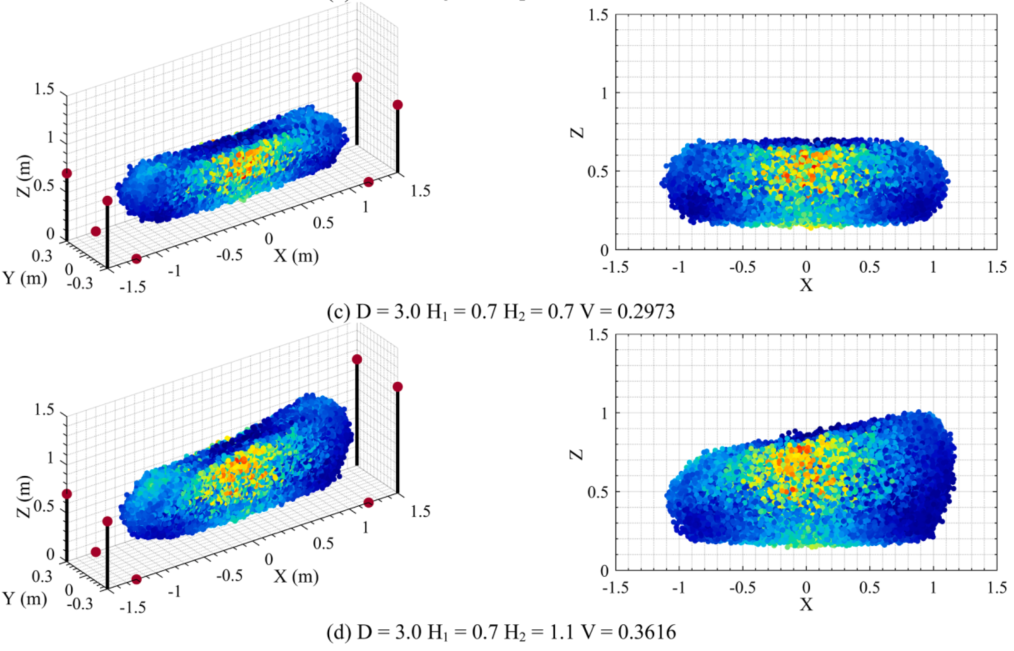
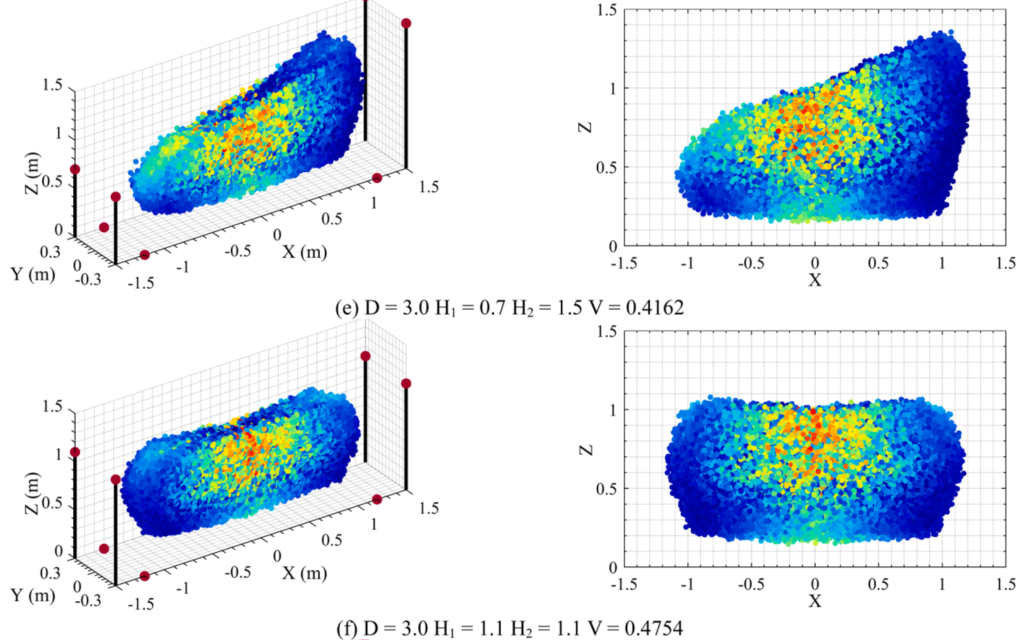
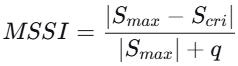
Figure 11:MSI 集成扳手-不同配置的可行工作区。 D(m) 表示移动底座之间的距离,H1(m) 和 H2(m) 表示可重构锚点高度,V(m3 ) 表示当前配置中的工作空间体积。
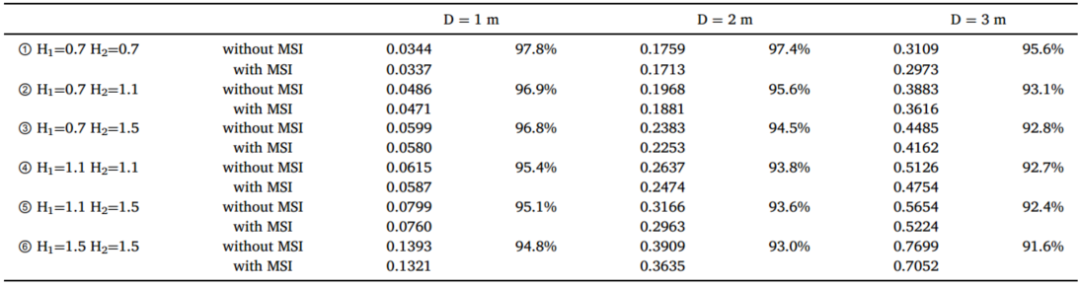
图11展示了18种构型下的稳定工作空间。体积从最小的0.0337 m³(图11a)到最大的0.7052 m³(图11h),增长了近20倍。所有构型下,MSI-WFW体积都保留了原WFW的90%以上(表4)。
表4扳手可行工作空间计算以及与 MSI 集成的比较。
🧮刚度分析
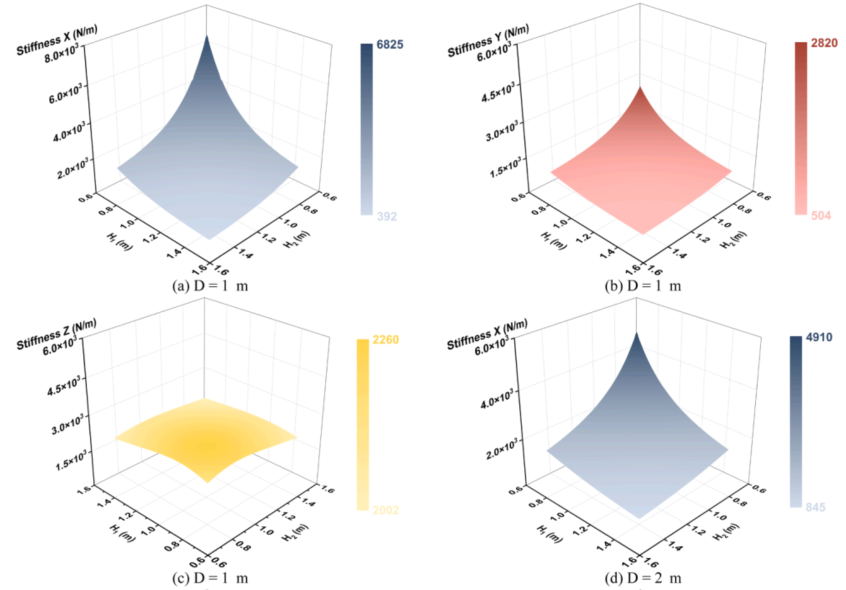
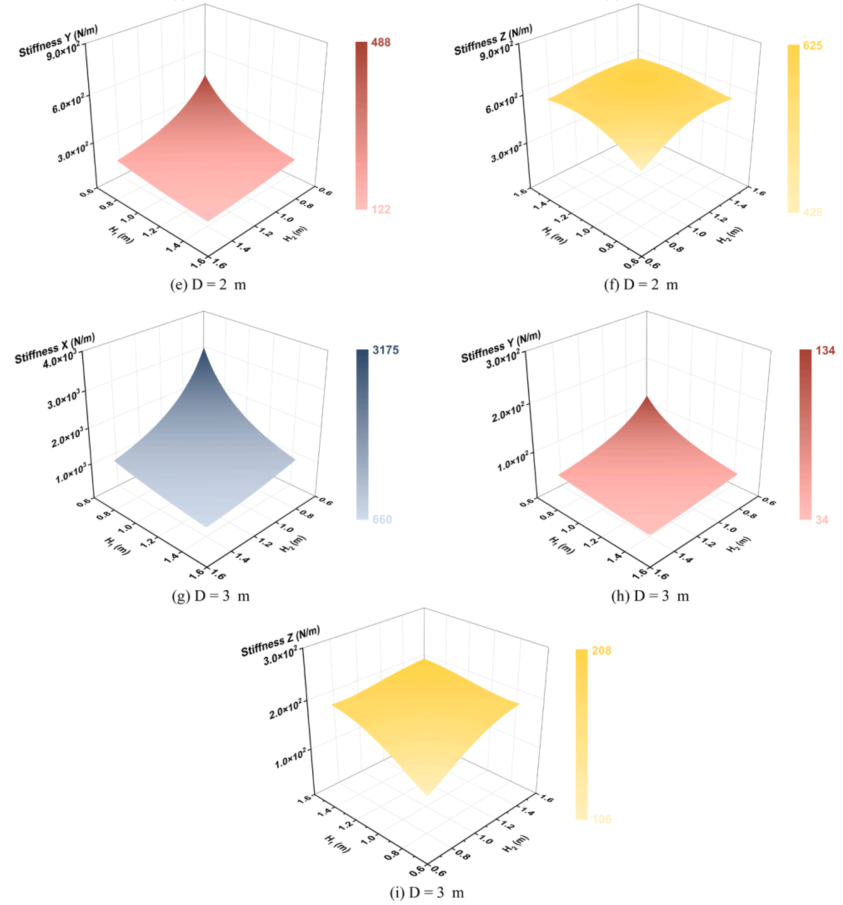
Figure 12:具有不同锚高度的不同配置的刚度分量。
图12显示,X方向刚度最大(3000-6800 N/m),Y方向刚度最小且随底盘间距增大急剧下降(从2800 N/m降到134 N/m)。Z方向刚度较稳定(100-300 N/m)。
🏗️ 实验验证
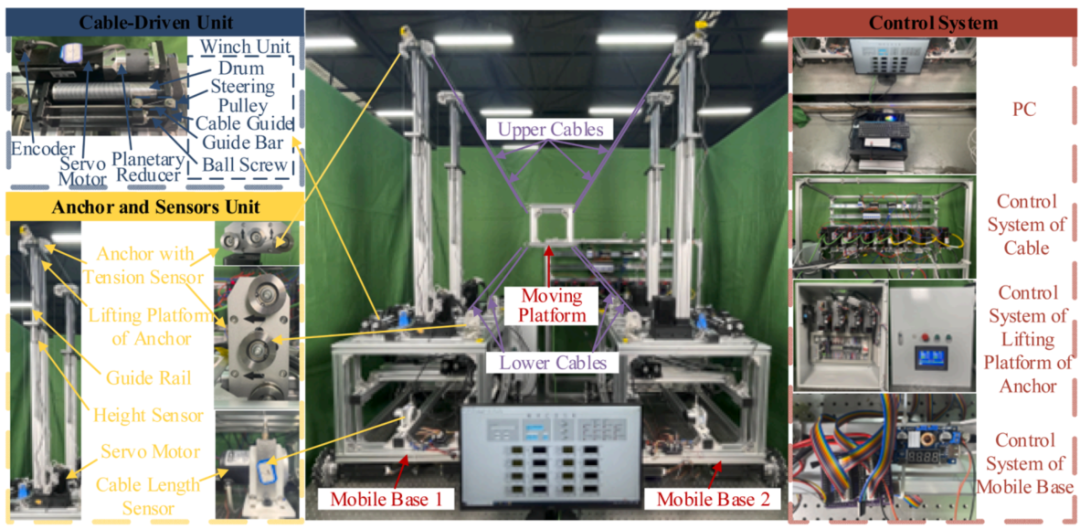
Figure 14:移动式电缆驱动平行喷涂机器人实验样机
图14是实物原型。两个移动底盘、八套缆索驱动单元、四套锚点升降单元、三个控制系统。缆索用超高分子量聚乙烯,直径2毫米,刚度3.76×10⁶ N/m。
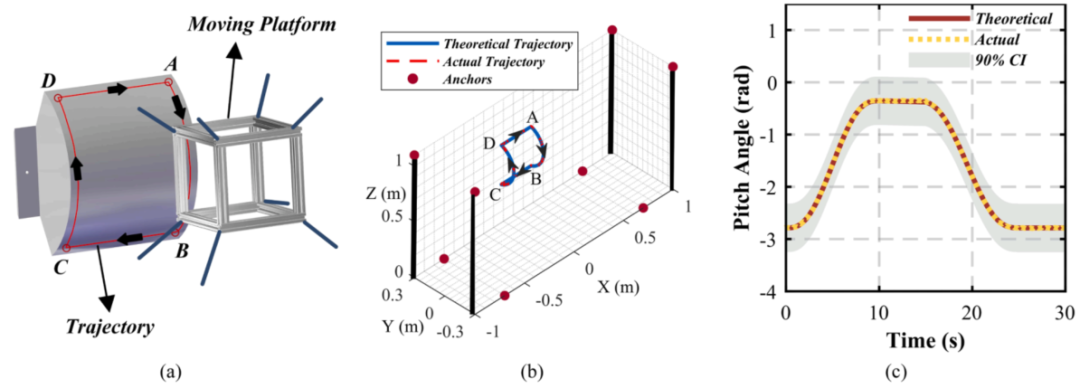
Figure 17:预设喷涂轨迹和运动跟踪结果
图17a是预设的“口”字形轨迹,包含两段直线和两段弧线。图17b是理论轨迹和实际轨迹的对比,肉眼几乎看不出区别。图17c是MP在弧线段的理论和实际俯仰角。
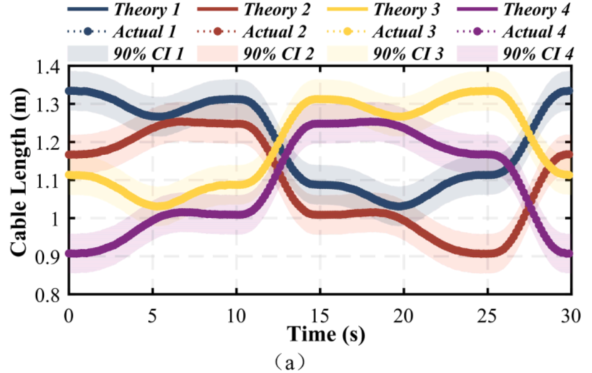

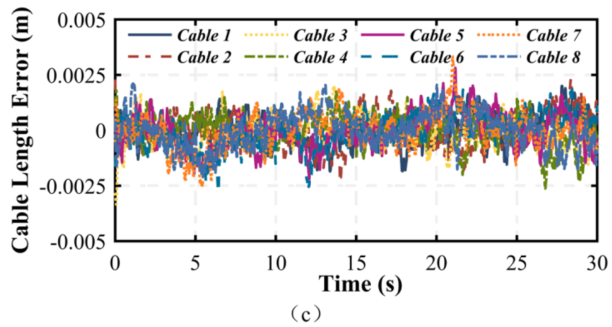
Figure 19:八根缆索的理论长度与实际长度对比
图19a-h显示,八根缆索的最大长度误差仅0.33毫米。
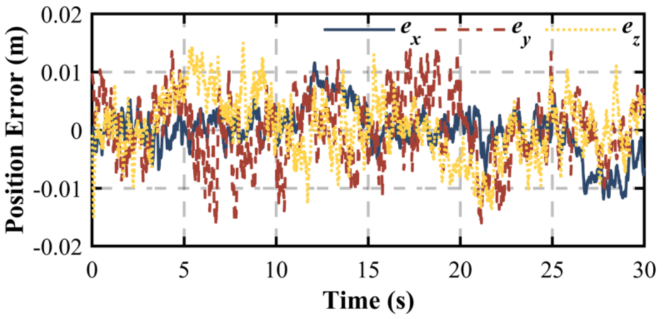

Figure 20:MP位置误差和误差统计
图20a是X、Y、Z三个方向的位置误差,最大1.5厘米左右,平均误差都在8毫米以内。图20b是误差分布的直方图,Y和Z方向有偏,X方向最集中。

Figure 21:MP位置误差和缆索长度误差的提琴图
图21直观展示了误差分布。MP位置误差的标准差在2.6-3.4毫米之间,缆索长度误差的标准差在0.4-0.5毫米之间。

Figure 22:两种重构构型的照片
图22a是底盘间距1米、锚点高度均为1.1米的构型;图22b是底盘间距2米、H₁=1.1米、H₂=1.5米的构型。
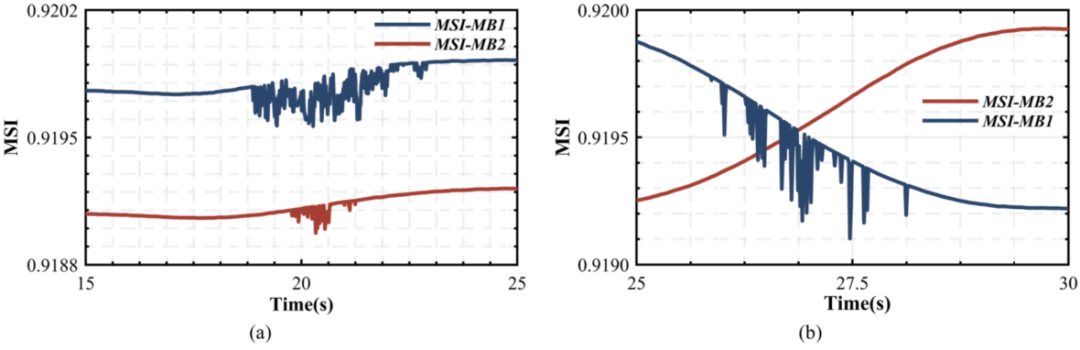
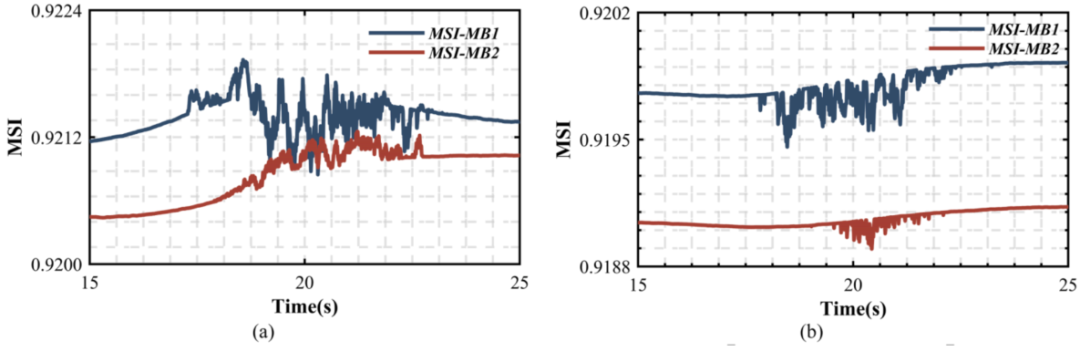
Figure 24-25:不同构型下的MSI实时曲线
图24是基准构型下15-25秒弧线段和25-30秒直线段的MSI曲线。弧线段靠近MB-1,MSI-MB-2较低;直线段从MB-1向MB-2移动,MSI-MB-1下降、MSI-MB-2上升。
图25a是缩小底盘间距(1米)的MSI曲线,整体MSI升高但波动变大。图25b是升高H₂(1.5米)的MSI曲线,MSI-MB-2变化明显,MSI-MB-1基本不变。
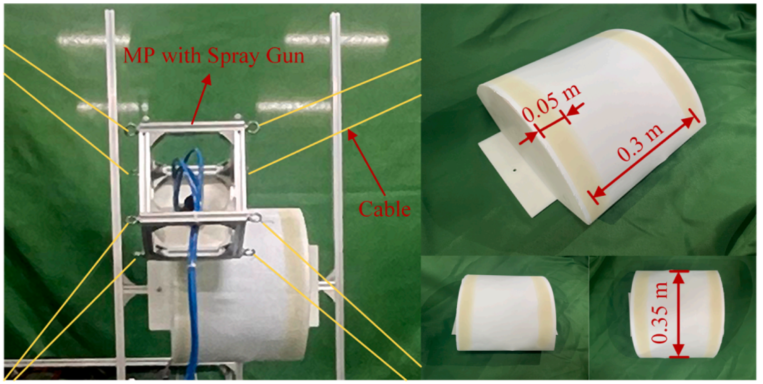
Figure 27:垂直表面喷漆实验快照和实际喷漆效果。
图27是喷涂实验结果,漆膜图案与设计目标基本一致,边缘有轻微锯齿和扩散。
03 创新点① 移动稳定性指数MSI
把倾覆和打滑这两个工程问题量化成一个0-1的指数,同时考虑了缆索拉力、底盘自重、轮地接触力、ZMP位置等因素。这个指数不仅可以用来实时监测,还能作为约束加到工作空间求解里。
② 稳定性约束下的工作空间求解
传统WFW只考虑缆索张力范围和静力平衡,可能包含那些理论上有解、但底盘会翻倒的位姿。他们把MSI条件加进去,生成的工作空间是真正“能站稳”的。
③ 移动底盘+缆索驱动的结构设计
两个麦克纳姆轮底盘提供平面移动能力,八根缆索提供六自由度末端运动,锚点可升降增加重构性。这个结构让机器人既能覆盖大范围垂直面,又能保持末端灵活性。
④ 可重构性的系统研究
表1的18种构型覆盖了不同的锚点高度和底盘间距组合。仿真和实验都表明,通过调整这些参数,可以在工作空间体积和稳定性之间做权衡。
⑤ 实机验证的完整性
从轨迹跟踪精度、缆索长度误差、MSI实时监测到实际喷涂效果,实验覆盖了机器人工作的各个环节。轨迹跟踪误差<8毫米、MSI始终>0.918、喷涂图案达标,说明这个设计确实能用。
04 总结与展望这个工作的核心贡献可以概括为:给移动缆索机器人装了一个“稳定性仪表盘”。MSI这个指数让设计师和控制器都能实时知道底盘离翻倒或打滑还有多远。把它加到工作空间求解里,能避免规划出“理论上可行但实际会翻”的路径。
从工程角度看,这种移动+缆索的结构很适合大范围垂直面作业。八个缆索冗余驱动,既保证了末端灵活性,又能在部分缆索失效时继续工作。锚点可重构让机器人能适应不同尺寸的作业面。
未来研究将聚焦于以下几个方向:🔸张力分配算法优化:目前用线性规划最小化最大张力,但张力波动还会影响末端精度。需要更精细的实时张力控制策略。
🔸考虑软管的动力学:实验中发现,连接喷涂系统的软管会给末端带来1-3牛的干扰力,还会引入低频振荡。需要把软管的质量、刚度、阻尼和流体效应建模进去。
🔸实时自适应轨迹规划:现在的轨迹是预设的。如果能根据实时MSI反馈动态调整末端路径,可以在稳定性下降时提前规避风险。
🔸多机协同喷涂:如果两个这样的机器人协同工作,一个喷一面墙或者一个喷船体、一个喷甲板,效率会高很多。
🔸更精确的传感器融合:实验用运动捕捉系统测末端位姿,实际应用中需要融合缆索长度传感器、IMU、视觉等多源信息。
🔸抗扰动控制:实验中的喷涂软管扰动已经明显影响了精度(峰值误差2-8毫米)。需要设计扰动观测器或自适应前馈来抑制这类周期性扰动。
从仿真到实机,从轨迹跟踪到实际喷涂,这个MCDSR系统已经走完了工程落地的关键几步。下一步,是让它去真的船厂、建筑工地试试。
声明:本文仅供学术交流,版权归原作者所有。如有错误或侵权,请联系更正或删除,欢迎留言探讨。