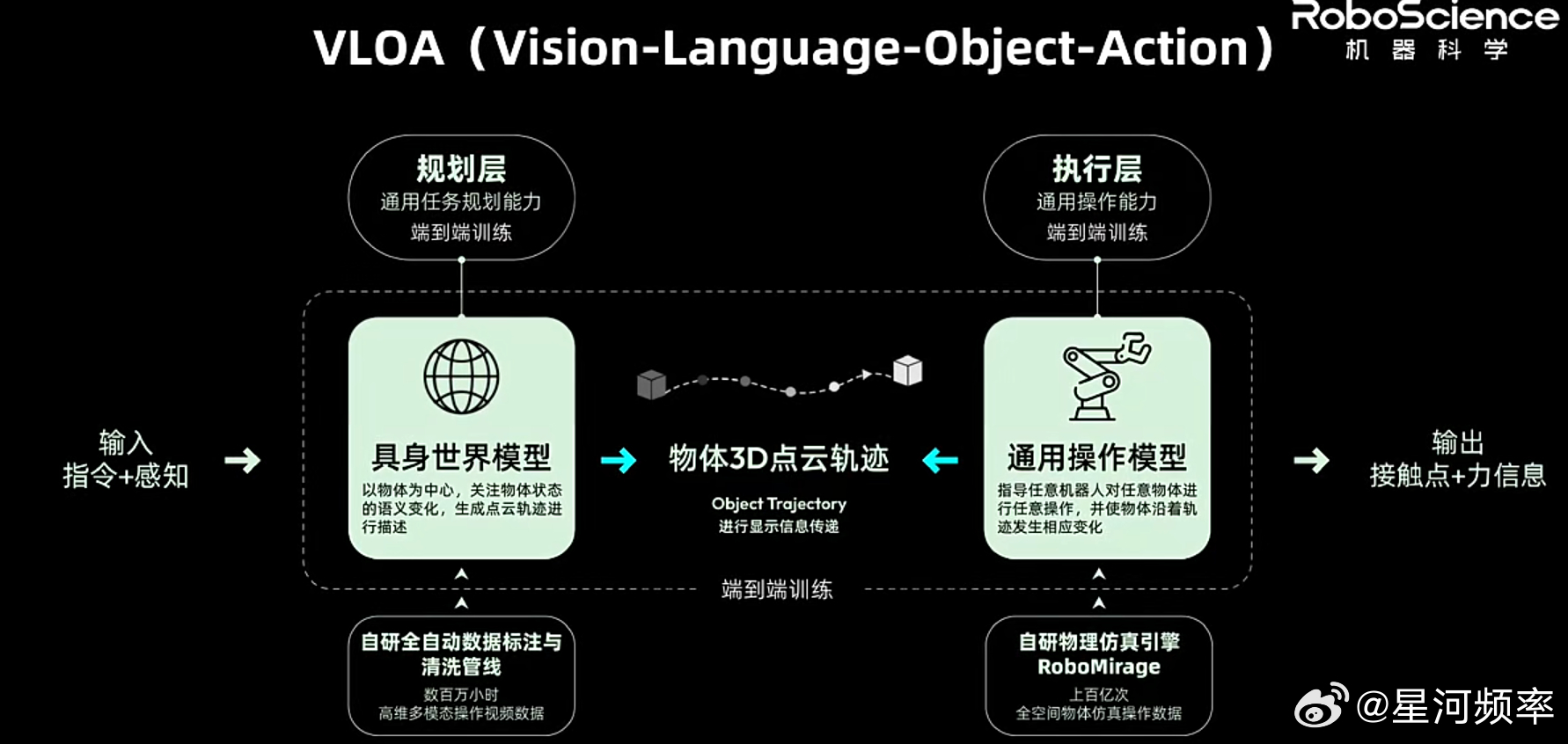
RoboScience 机器科学发布了通用具身大模型 Visics,让机器人从学习动作走向理解并改变世界。模型采用以物体为中心的VLOA架构,上层是从 V→O(Vision to Object),由具身世界模型负责语义规划,理解场景中的对象和指令意图,回答物体应该发生怎样的状态变化才算完成任务;
下层 O→A(Object to Action),由通用操作模型负责物理执行,让机器人依据物理规律操作物体,使其产生期望的运动变化。
在模型训练时,将通用大脑和硬件进行解耦,显著提升模型的泛化能力。具身智能大模型