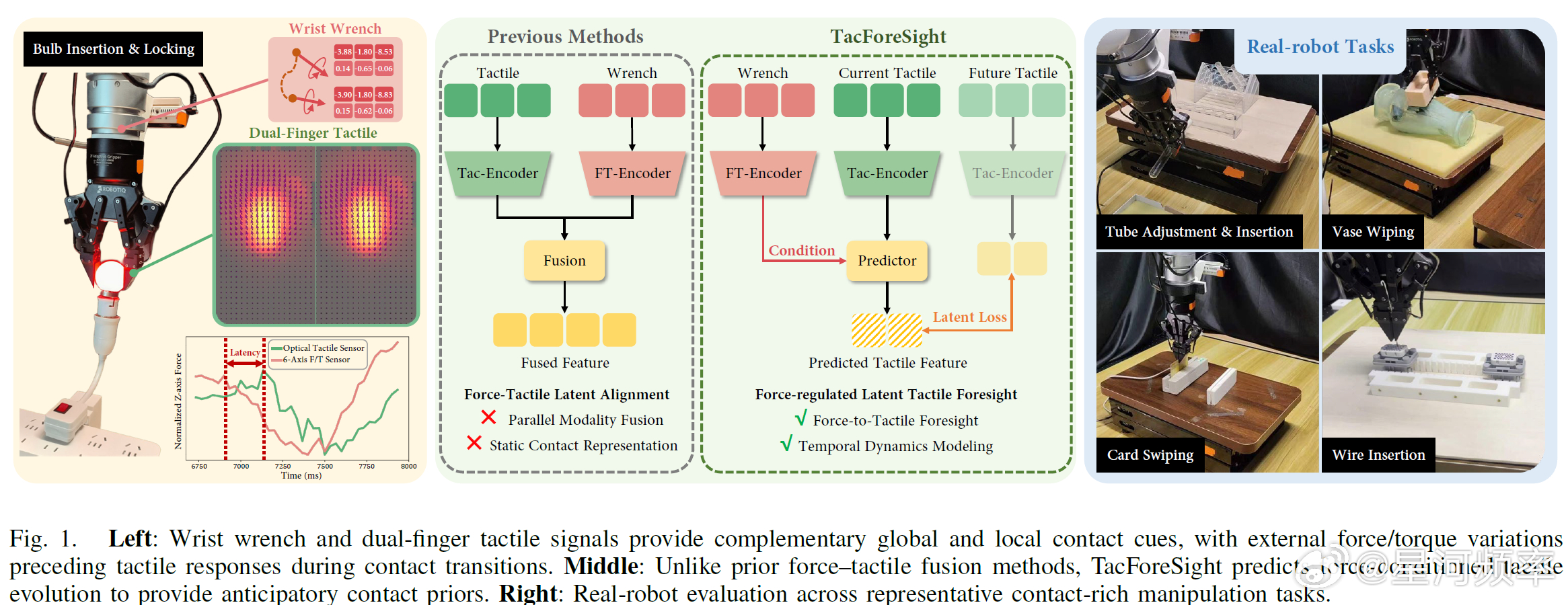
近日,它石智航联合新加坡国立大学、上海交通大学、中科院自动化所、复旦大学发布论文 “TacForeSight: Force-Guided Tactile World Model for Contact-Rich Manipulation”。
研究提出了一种力条件触觉世界模型,首次将腕部力觉作为未来触觉状态的先导信号,用于预测短时接触演化,并将预测结果引入机器人动作生成过程。这意味着机器人不再只是依赖触觉反馈进行事后修正,而是能够提前理解接触变化、预测接触变化,并在物理世界发生变化之前主动调整动作。具身智能大模型