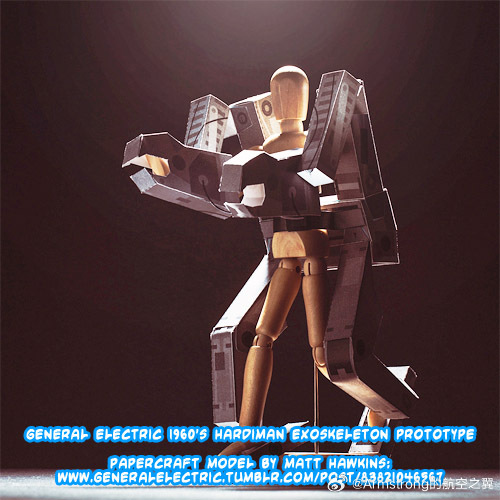
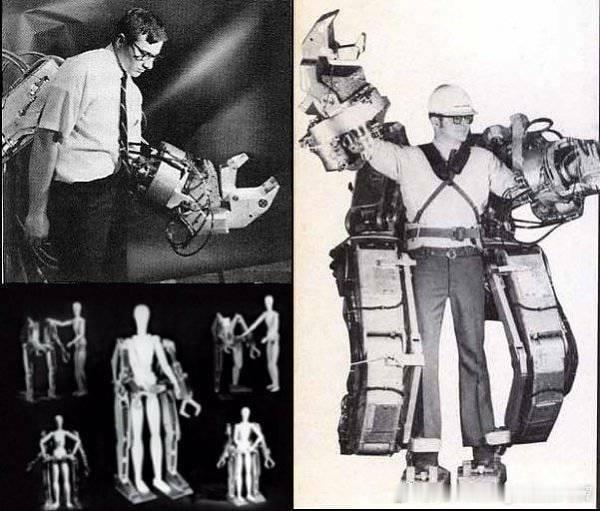
在60年代中后期,随着液压技术和早期控制理论的发展,通用电气与美国军方(陆军和海军)联合启动了代号为 "Hardiman I" 外骨骼项目。
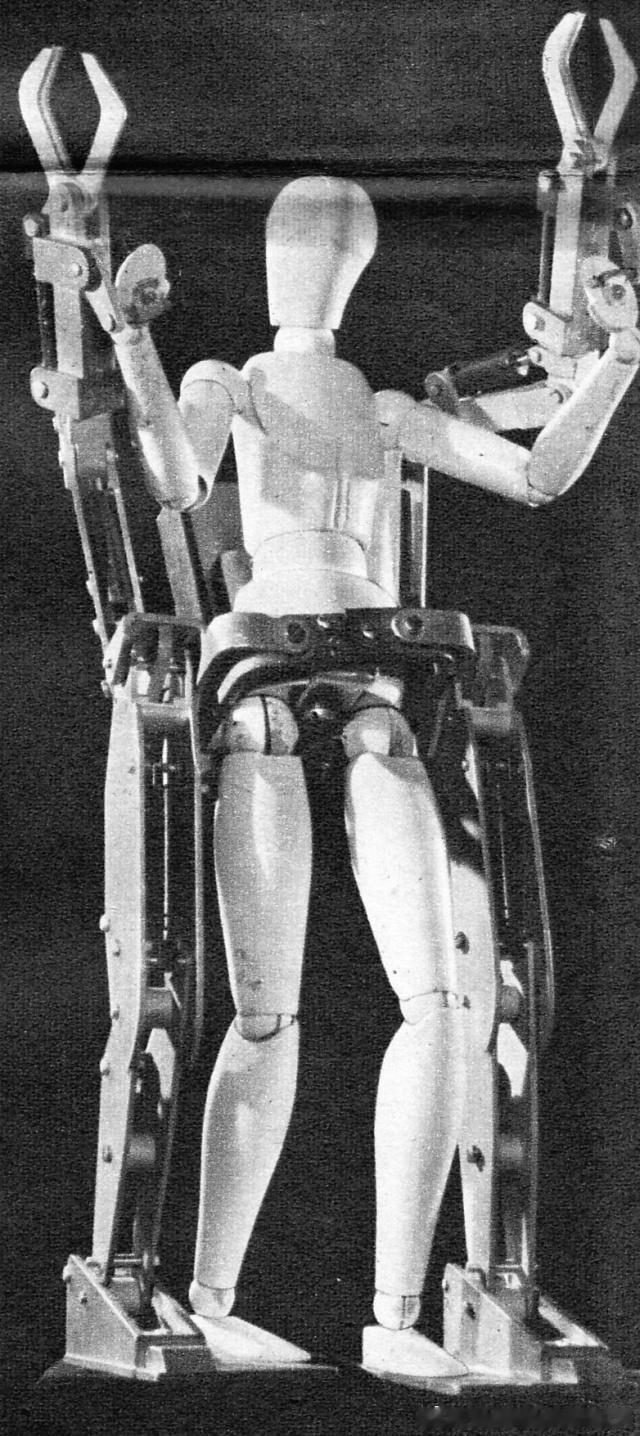
哈迪曼的技术突破在于其“双层外骨骼”设计,内层(主系统)紧贴操作员的身体,负责捕捉人类肢体的自然运动和微小力量变化。外层(从系统)由沉重的钢结构和液压缸组成,负责承受外载荷并执行大功率输出。
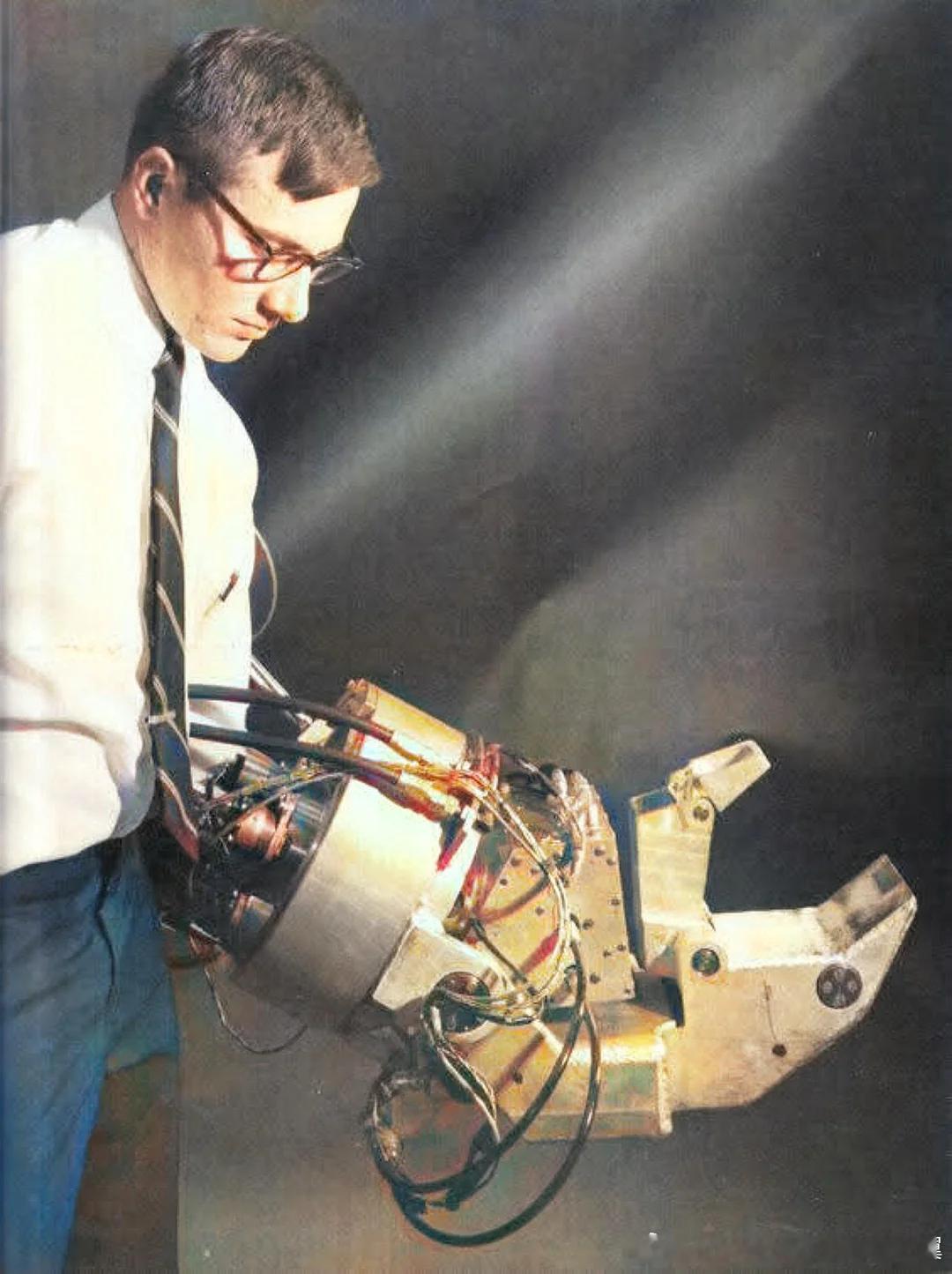
哈迪曼设计了触觉反馈,当外骨骼搬运100磅的重物时,操作员的身体只能感受到大约4磅的阻力(1:25 的比例)。这种“机械放大感”让操纵者能直观感受到物体的存在,避免用力过猛破坏物体。
该项目的终极目标是让士兵或仓库工人能够轻松举起1500磅(约 680 公斤) 的弹药或物资。
然而,在实际研发过程中,由于1960年代的技术限制,哈迪曼遇到了致命的瓶颈。
系统的液压控制极其不稳定。一旦试图将手臂和腿部系统连接并通电,整台机器就会陷入剧烈且不可控的自我震颤(自激振荡)。由于担心巨大的液压力量把测试员“活活撕裂”,工程师们从未允许任何人穿上完整的全身版本进行通电测试。
为了实现举起1500磅的目标,外骨骼自身的重量飙升到了惊人的1500磅。它自身消耗的能量甚至远超它能提供的帮助。
项目最终被拆分。工程师们放弃了全身联动,转而只测试了其单条机械臂。在测试中,这条独臂成功实现了举起750磅(约340公斤)的纪录,证明了力反馈液压原理的可行性,但这离实战和工业应用还差得太远。
哈迪曼项目最终于1971年左右被正式终止。它虽然是一次失败的商业和军事尝试,但它被称为现代动力外骨骼的始祖。
它踩过的坑(如传感器延迟、双足平衡控制、液压伺服系统的稳定性、以及便携式能源的匮乏),直接启发了后世半个世纪的机器人学研究。直到几十年后,微处理器算力的爆发、高能锂电池以及轻量化伺服电机的出现,才让哈迪曼项目当年的梦想在现代得以真正实现。