技术巡猎 蔚来 车辆涉水的检测方法、检测装置、存储介质和车辆。车辆涉水检测看起来是个小功能,但它背后其实是安全判断。雨天积水、地下通道、城市内涝、户外穿越水域,这些场景里,一个模糊提示对用户来说没什么参考意义,他们想知道的是车辆能不能比较可靠地判断自己到底有没有涉水、涉水到什么程度、还能不能继续走。
这份蔚来专利先把问题讲得很清楚---车辆涉水可以大致分成未涉水、局部涉水和全部涉水。未涉水或局部涉水时,车辆一般还能正常行驶;但全部涉水时,水可能从车门缝隙、机舱盖缝隙、通风口等进入车身内部,造成核心部件机械故障、电气设备侵蚀、短路或电子元件损坏,严重时还会影响人员安全。
过去用图像识别判断涉水状态,是一个直观方案。摄像头采集环境图像,再由模型识别涉水状态。但问题也非常现实:夜晚、阴天、反光、雨雾这些光线受限条件下,视觉判断容易不准。误判会让车辆没有及时提醒用户,误报又会降低体验。
所以这份专利没有把判断压在单一视觉上。
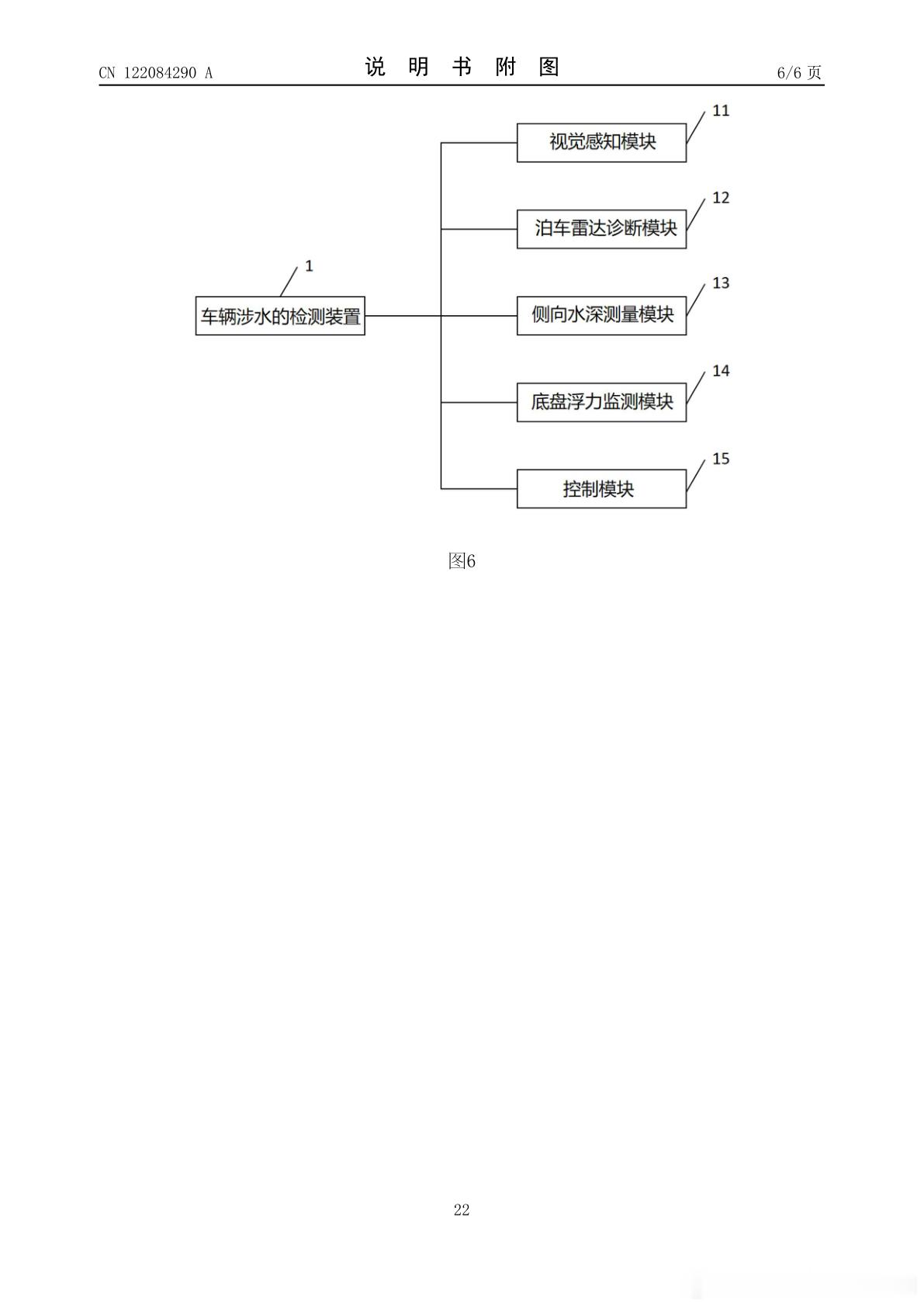
它的流程是:先用视觉感知模块获取目标车辆的初步涉水状态,初步状态包括未涉水、局部涉水和全部涉水;再用泊车雷达诊断模块判断泊车雷达是否出现涉水故障;同时采用侧向水深测量模块,或者底盘浮力监测模块,获取目标车辆涉水深度。最后根据初步涉水状态,结合泊车雷达是否故障和涉水深度,对初步判断做验证,确定最终涉水状态。
这套逻辑的重点是验证。
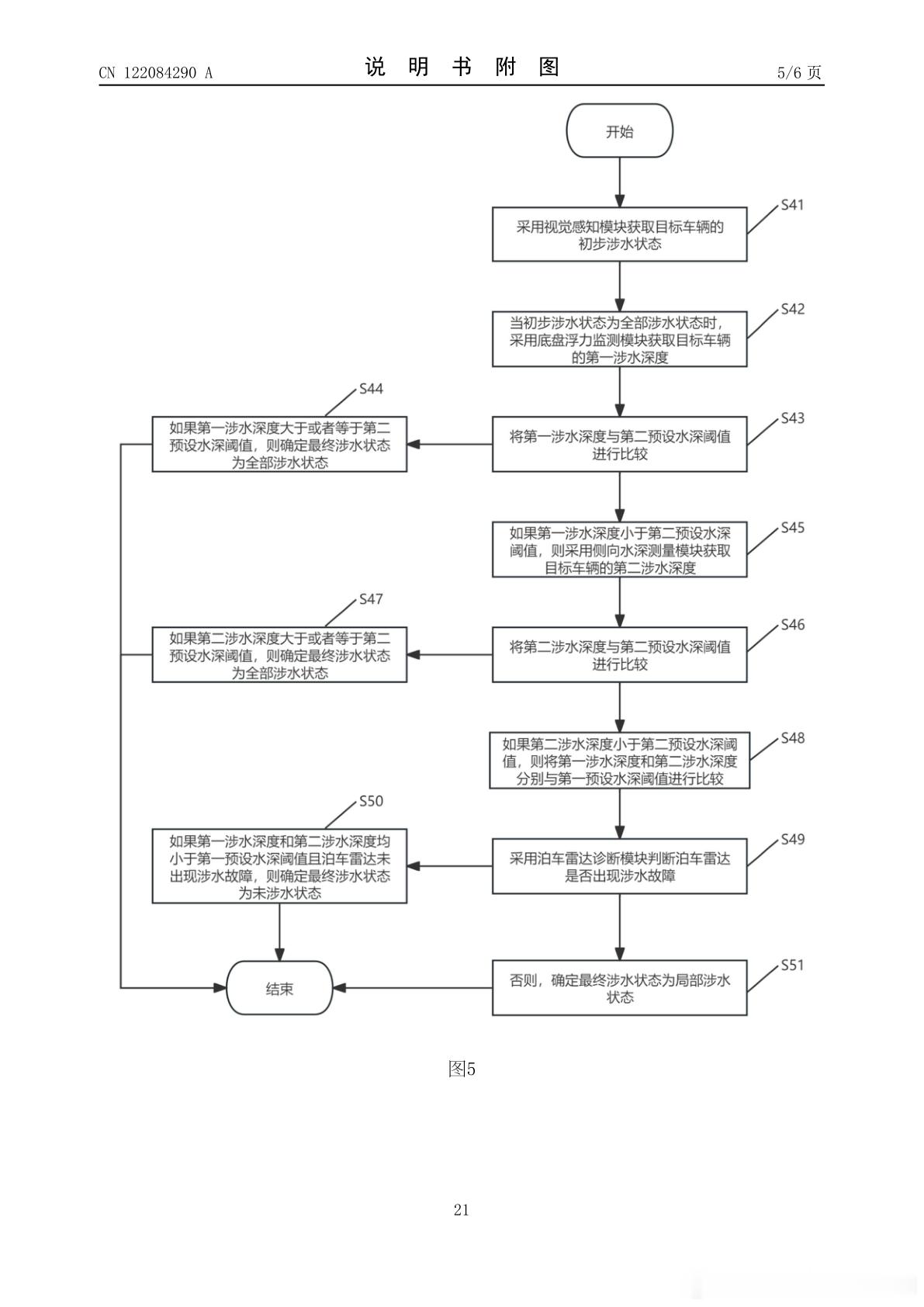
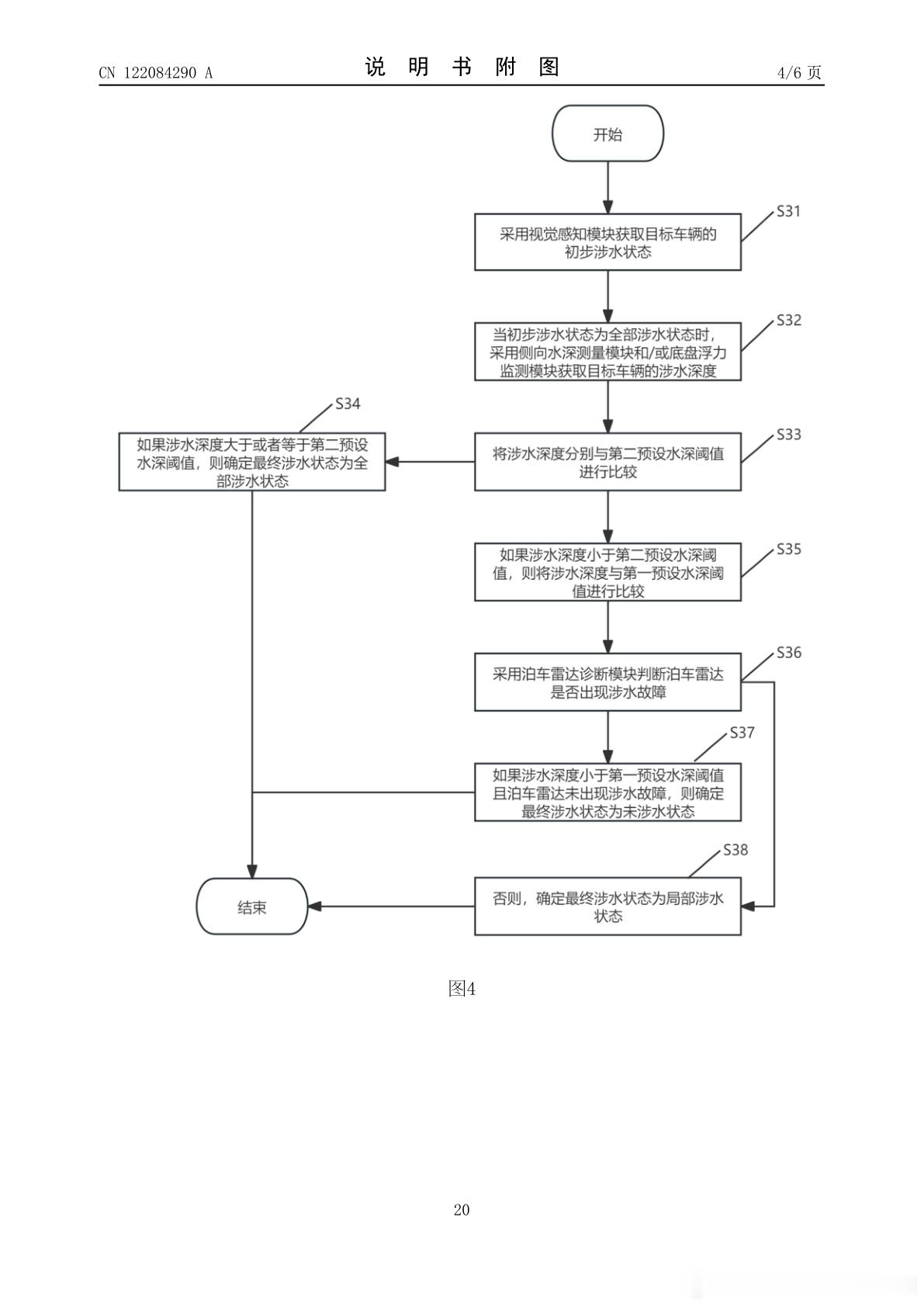
如果视觉判断未涉水,同时泊车雷达也没有出现涉水故障,系统可以更有把握地确定未涉水。如果视觉说未涉水,但泊车雷达出现涉水故障,就说明可能存在偏差,需要进一步看侧向水深或底盘浮力信号,再用第一预设水深阈值和第二预设水深阈值去判断未涉水、局部涉水或全部涉水。
它是多源信息的互相校验。
局部涉水和全部涉水的分支也体现了这个思路。视觉初步判断局部涉水时,泊车雷达如果出现涉水故障,系统可以把这一判断作为更强信号;如果泊车雷达没有故障,就继续看涉水深度,再决定到底是未涉水、局部涉水还是全部涉水。视觉初步判断全部涉水时,也不是直接结束,而是要看侧向水深或底盘浮力监测结果是否超过第二预设水深阈值。
这套分支的意义在于,它承认单一传感器会错。视觉可能被光线骗,雷达可能因为水面或附着物出现异常,水深测量也可能受车身姿态影响。把这些信号放在一起,主要是为了减少单点误判。
涉水状态和普通障碍识别不一样,它不是看到前面有水就结束了。车在接触到水以后,水深、车身位置、底盘浮力、雷达状态都可能成为判断线索。尤其在低光环境里,视觉不稳的时候,泊车雷达异常反而可能成为一个提示信号。
放到用户体验里,这类能力不是为了让车鼓励用户涉水,而是为了减少两种风险:一种是明明已经危险,车辆还判断得太乐观;另一种是只是轻微积水,系统却过度报警,让用户不信任。
把涉水判断从“看见水”推进到“状态验证”,就是这份专利的价值。