技术巡猎 小鹏 车辆驾驶控制方法及车辆辅助驾驶以前在拥堵路段的时候,很容易暴露一个问题:导航知道目的地在哪里,也知道大路怎么走,但它未必知道此刻哪条车道更适合走。道路级拥堵信息实际上是非常粗略的,所以只能告诉你这段路堵不堵;可是真正开车的时候,左侧车道可能在动,当前车道可能是卡滞的,隔壁车道又可能因为汇入口马上就要慢下来。
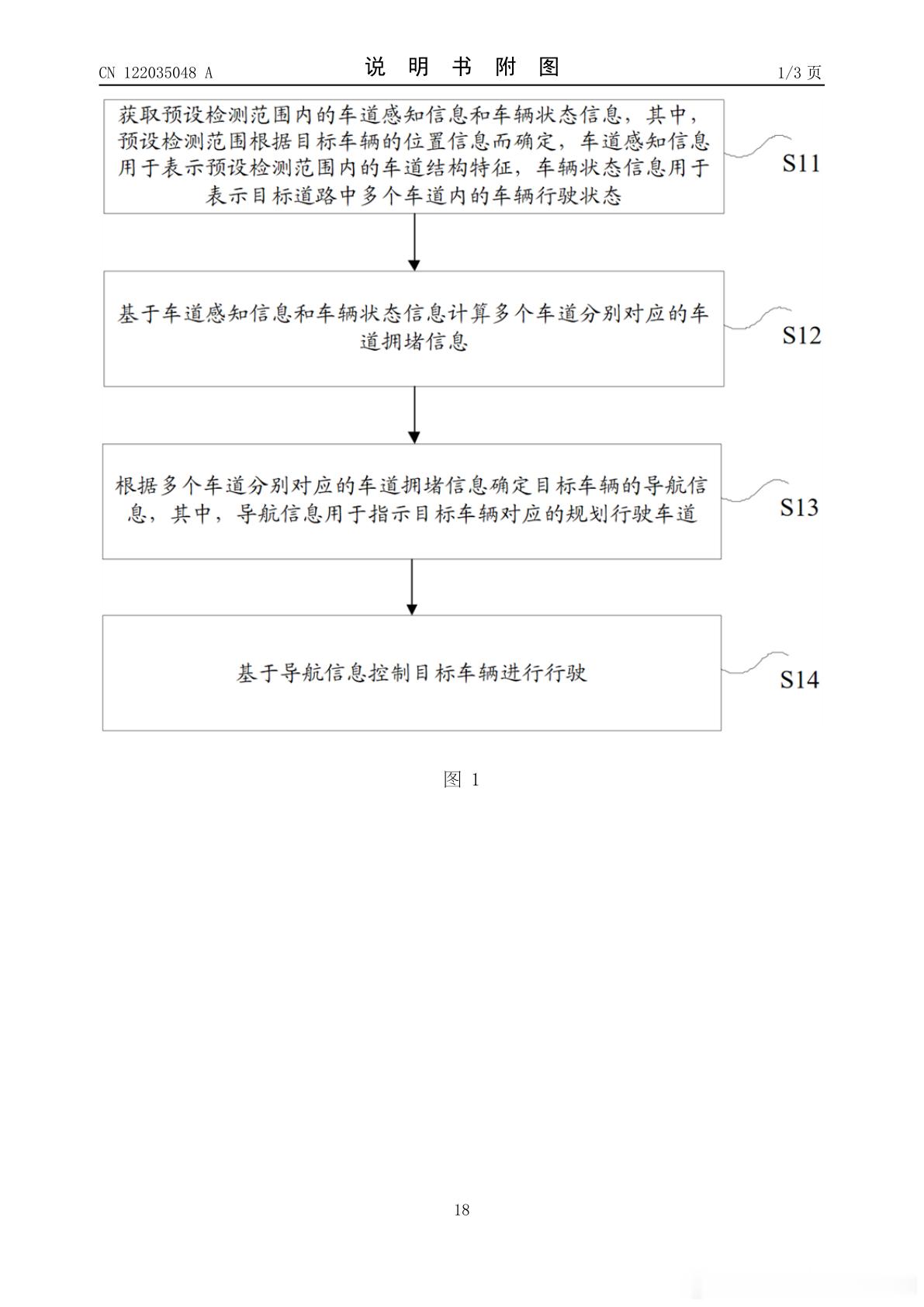
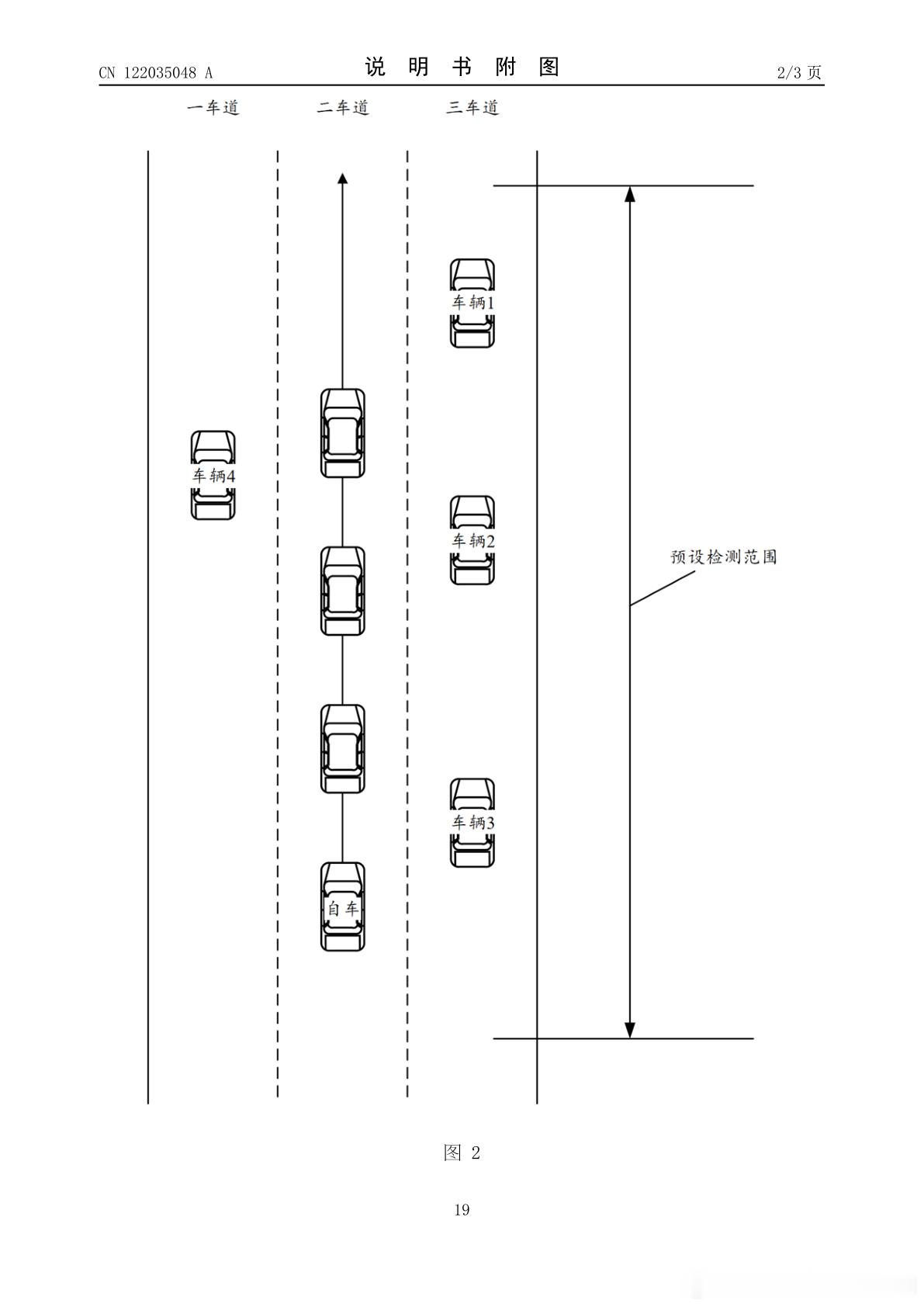
如果只按固定路线走,通行效率和驾驶体验都会受到影响。这份专利要处理的,就是车道级决策问题。方法先获取预设检测范围内的车道感知信息和车辆状态信息。预设检测范围根据目标车辆的位置确定;车道感知信息表示范围内的车道结构特征,车辆状态信息表示目标道路中多个车道内的车辆行驶状态。系统再基于这些信息计算多个车道分别对应的车道拥堵信息。
拥堵信息可不是一句“堵车”。专利提到了,可以根据任一车道内的车辆总数、预设检测范围、车辆行驶速度数据,确定车流密度和车流平均速度,再据此确定车道拥堵信息。后面还可以把不同车道的拥堵信息映射成车道拥堵等级,再用这些等级确定导航信息,指示目标车辆对应的规划行驶车道。
这一步对辅助驾驶非常关键。传统导航更像是在道路上规划路线,车道级拥堵判断则是在路线内部继续做选择。当前车道拥堵等级高,相邻车道拥堵等级低,系统可以生成变道规划信息,引导车辆从当前车道变到相邻车道;如果相邻车道也高于预设拥堵等级,就基于当前车道生成导航信息。当当前车道拥堵等级大于或等于预设等级时,可以调整制动加速度,并开启跟停前车模式。
用户感受到的,肯定不是“车流密度算法上线了”,而是智驾能够在拥堵里少一点犹豫。好的辅助驾驶不能只会保持车道、跟车和按导航行驶,还要理解车道之间的速度差、密度差和结构差。它要像一个熟悉路况的驾驶员一样,知道什么时候换道有意义。
当然这是有难点的,车道级选择只追求快肯定是错误的。系统除了看到相邻车道更通畅,还要判断变道空间、后车速度、前车减速、车道线规则、出口和汇入口位置。如果只根据拥堵等级去换道,车辆可能变得过于积极,反而容易让用户不信任。专利里把制动加速度调整和跟停前车模式写进来了,说明它不是只做“换到不堵的车道”,也要在拥堵无法规避时让车更平顺地跟停。
这类方案还会影响导航和智驾之间的关系。过去导航给路线,智驾负责沿路线执行;车道级拥堵决策会让导航信息变得更细,甚至进入车辆实时控制。路线规划、车道选择、速度控制和换道动作之间要形成闭环,系统才能在复杂交通里实现“不发呆”。
如果这个闭环做得好,车辆就不止会在宏观路线上做选择了,在局部交通里实际上也有选择能力。拥堵路段的体验差距,很多时候就来自这些小决策。