技术巡猎 蔚来 智能设备轨迹预测方法、智能设备及计算机可读存储介质。自动驾驶模型怎么在“想去哪儿”的同时,也可以知道“该以多快的速度去”---这句话放在高速NOA里,可能还不够刺激。但放到漫游泊车里,就挺有工程味了。停车场里的自动驾驶,不是跑得越快越好,也不是只要能绕开障碍物就算合格。真正难受的场景,往往是车明明没撞、也没压线,但速度节奏让人心里发毛。比如经过柱子突然窜一下,贴着行人还不够克制,快到车位时又刹得很突兀。
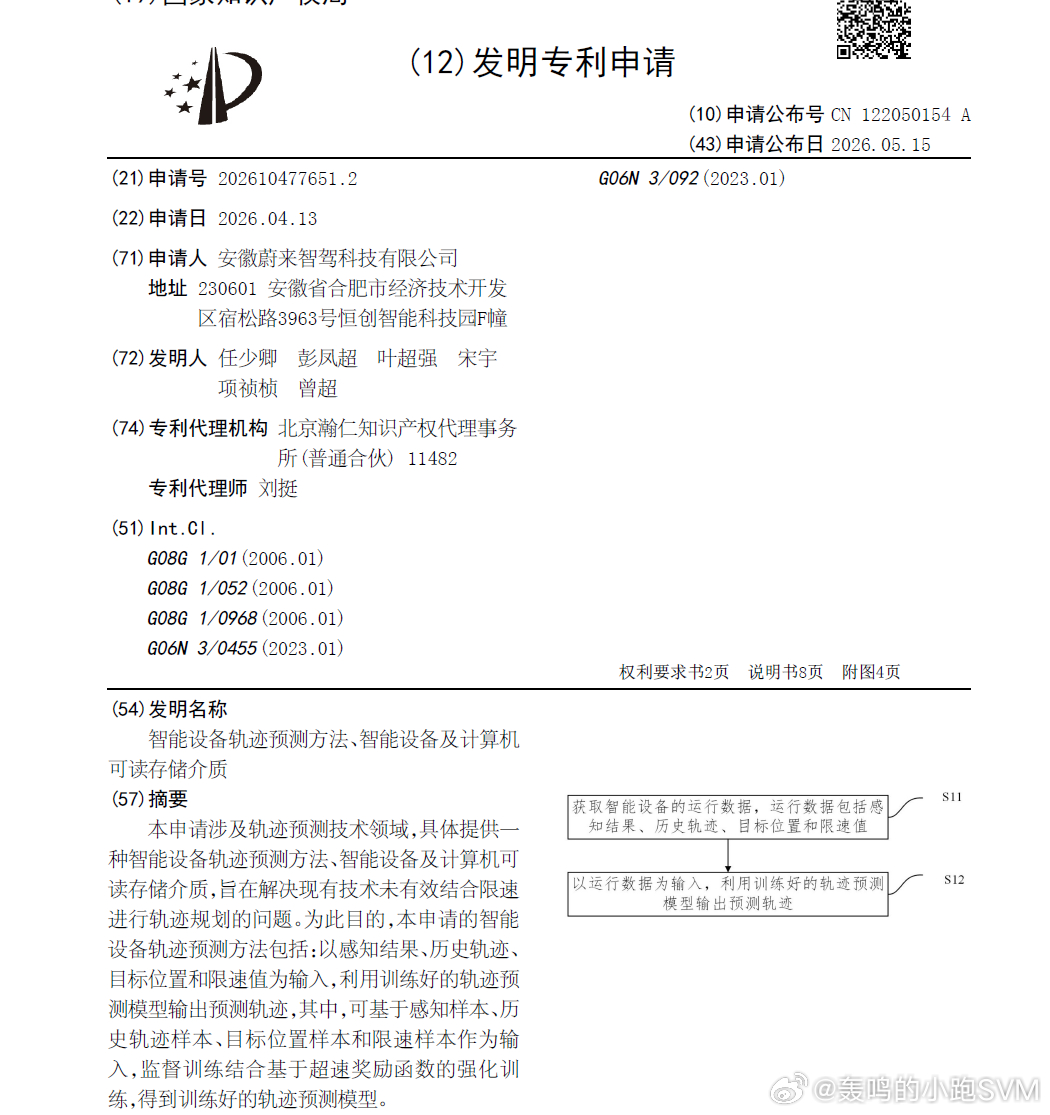
这份专利要解决的,就是现有轨迹规划没有把限速有效结合进去的问题。它的输入不复杂,主要包括感知结果、历史轨迹、目标位置和限速值。感知结果负责告诉模型周围有什么,比如车、人、路沿、墙、柱子;历史轨迹告诉模型车刚才怎么走;目标位置告诉模型最后要去哪;限速值则告诉模型当前环境下速度边界在哪里。
这几个东西合在一起,才像一个完整司机的判断现场。只知道目标位置,车会变成“只想完成任务”;只知道障碍物,车会变成“哪里能过就往哪里挤”;只靠规则限速,又容易变成后处理阶段的硬裁剪。工程上最怕的就是这种补丁式逻辑:模型先规划一条轨迹,后面发现速度超了,再强行压速度。听起来简单,实际很容易把轨迹连续性、到达节奏、转向曲率和舒适性一起搞乱。
专利里的做法更靠前。它不是等模型输出之后再处理,而是在模型训练和输入阶段就把限速纳入进去。训练分两步:先用感知样本、历史轨迹样本、目标位置样本和限速样本做监督训练,让模型学会基本的轨迹预测;然后再基于超速奖励函数进行强化训练。这个“奖励函数”普通人可以理解成一套训练里的扣分机制:如果预测轨迹算出来的规划速度超过限速,就把规划速度和限速之间的差值拿出来,通过预设系数转成奖励值或者惩罚项,让模型在迭代里慢慢减少这种超速行为。
这就有意思了。它不是简单告诉车“你不能超过10km/h”,而是让模型在生成未来轨迹的时候,自己意识到速度边界。比如停车场限速很低,车前方又有行人和柱子,模型输出的轨迹点之间距离和时间间隔就应该自然收敛。轨迹点排得太稀、时间又短,算出来速度就高;速度高了,训练阶段就会被惩罚。经过足够多样本之后,模型会倾向于生成更符合限速的轨迹。
专利还写了一个比较关键的预处理:限速值会基于预设离散策略转成限速编号。模型不一定喜欢直接处理一个连续的“46km/h”“12km/h”数字,尤其在轨迹预测这种时序任务里,离散化后更像一种语义标签。类似告诉模型:当前是低速区、中低速区、较高限速区,不同编号对应不同速度边界。这样模型更容易把限速和轨迹生成关联起来。
历史轨迹也类似。专利里提到对历史轨迹点做聚类,得到轨迹点集合和轨迹编号,还可以进一步对时间窗口里的轨迹点偏移量做聚类。普通人可以把它理解成:车过去怎么动,不只是几个坐标点,而是被整理成一套“运动语法”。比如刚才是在缓慢直行、轻微转弯、靠近目标、还是调整姿态。把这些轨迹变化编码之后,模型再接着预测未来轨迹,会比直接丢一堆连续坐标更稳。
网络架构上,它用了嵌入层、线性层、特征合并,再输入 transformer 解码器。这个不用神化。这里的 transformer,不是重点。重点是它把感知表征、历史轨迹表征、目标位置表征、限速表征放在同一个特征空间里,让模型同时考虑“环境、过去、目标、规则”。这四个词放在一起,才比较接近低速自动驾驶的真实难点。
很多人聊智能驾驶,容易被“能不能开”“能不能泊”吸引。但低速自动驾驶做到后面,拼的往往不是功能有没有,而是行为是不是像人。停车场里尤其明显,速度低,空间窄,障碍物多,参与者混杂,车还要在非常有限的空间里做连续微调。这个时候,车的每一次加速、减速、转向,都在影响用户信任。