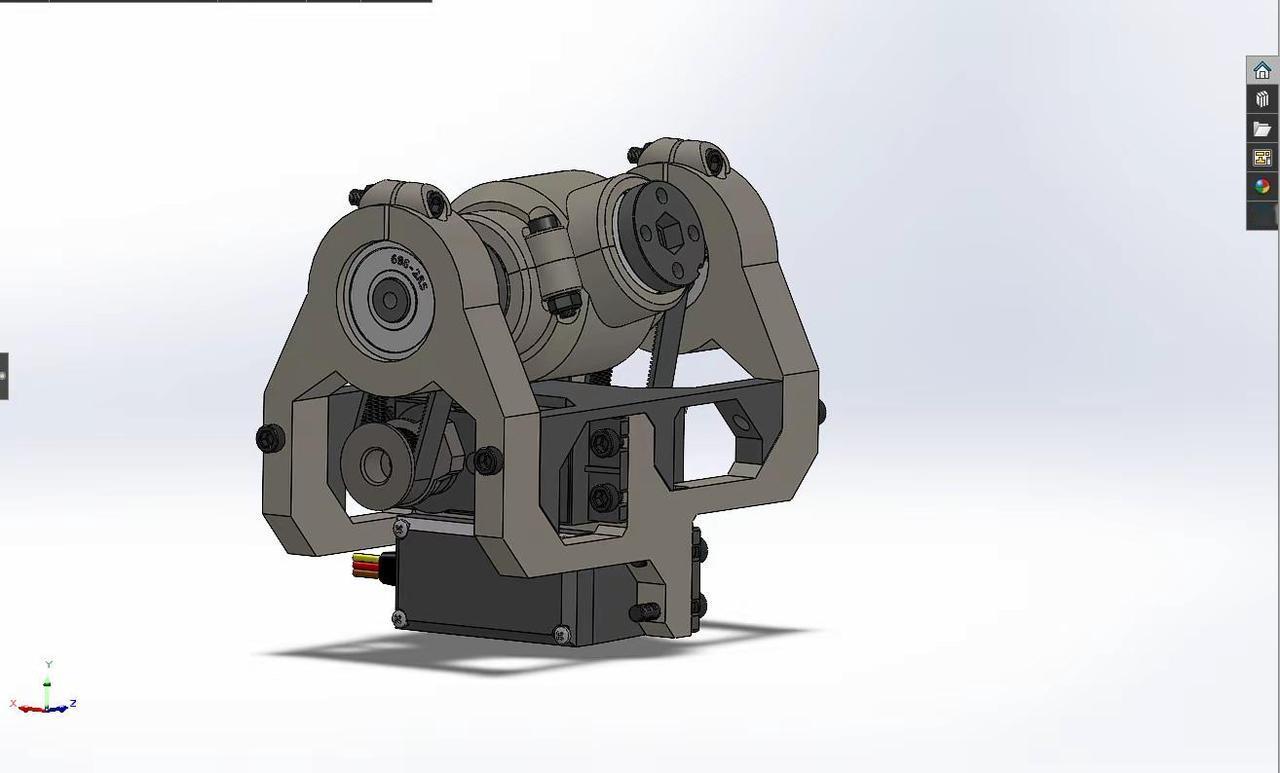
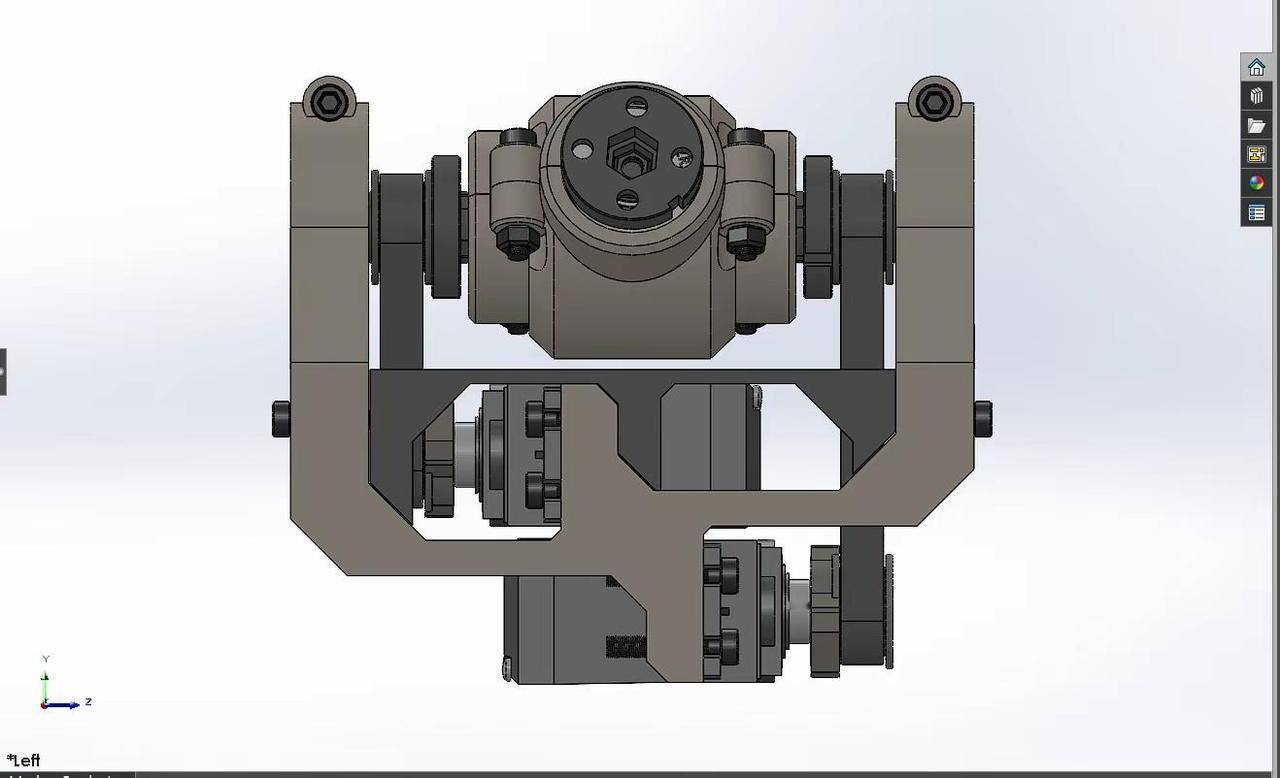
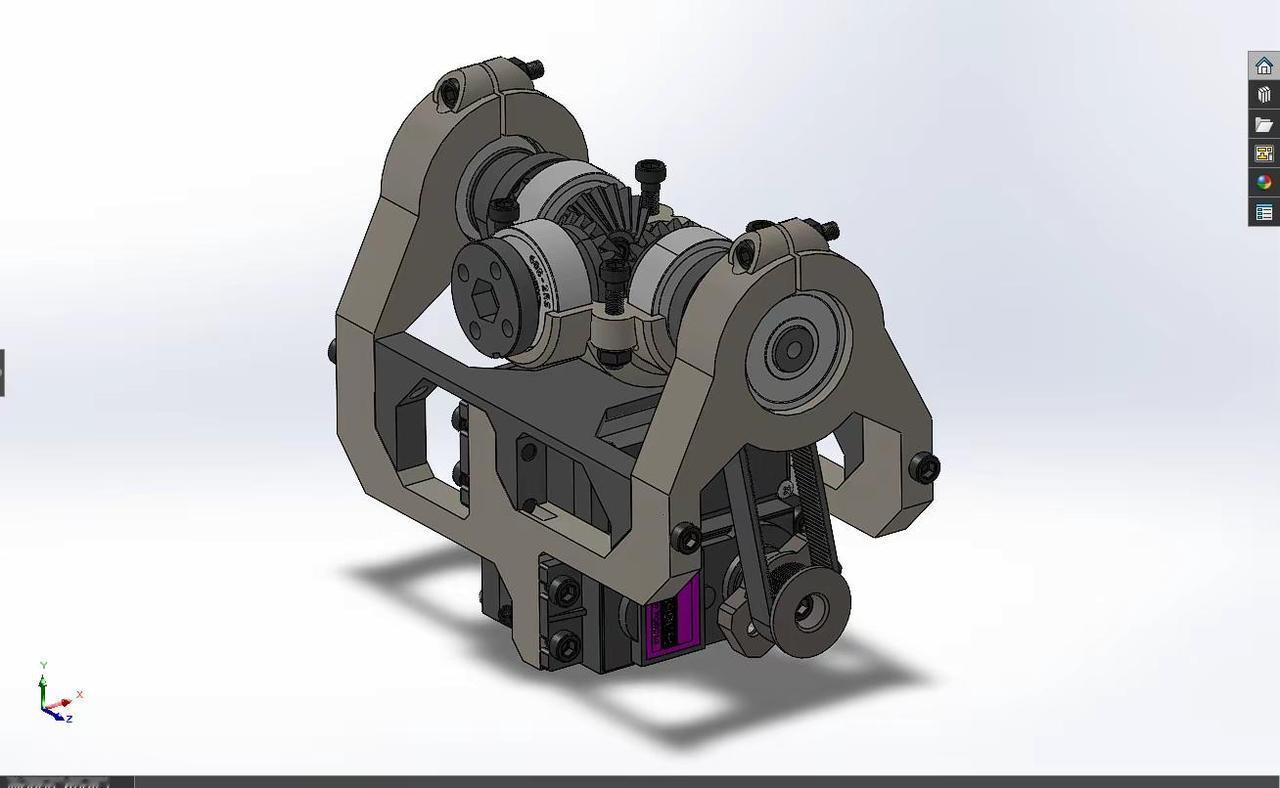
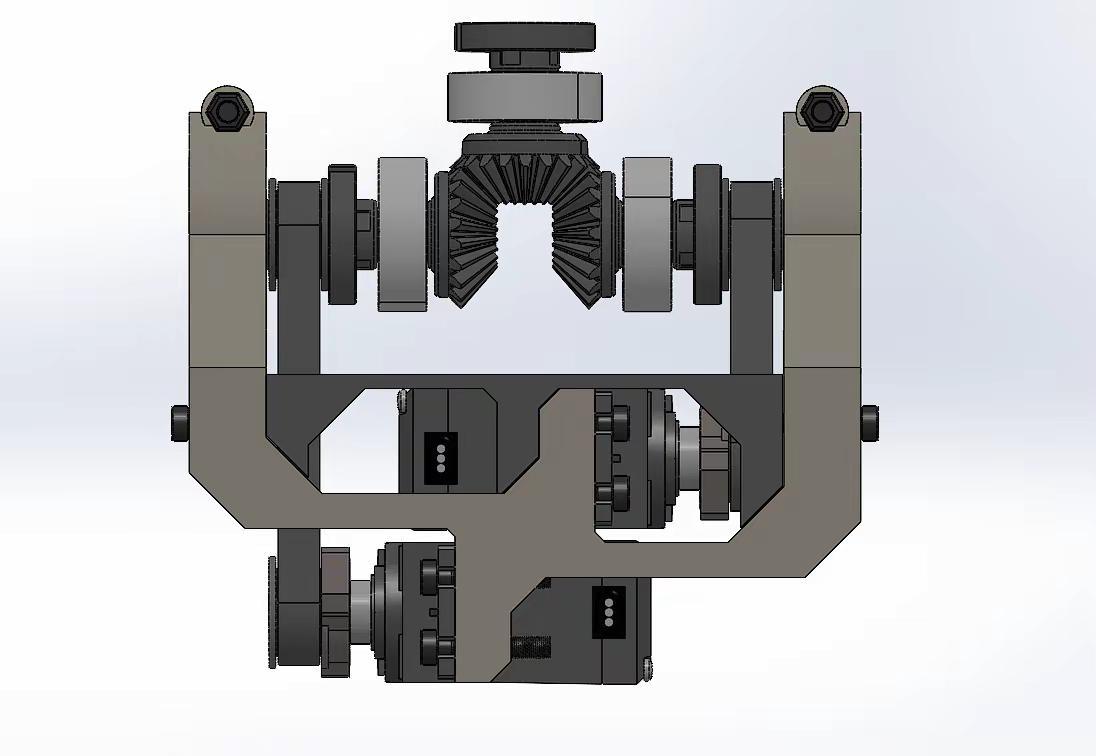
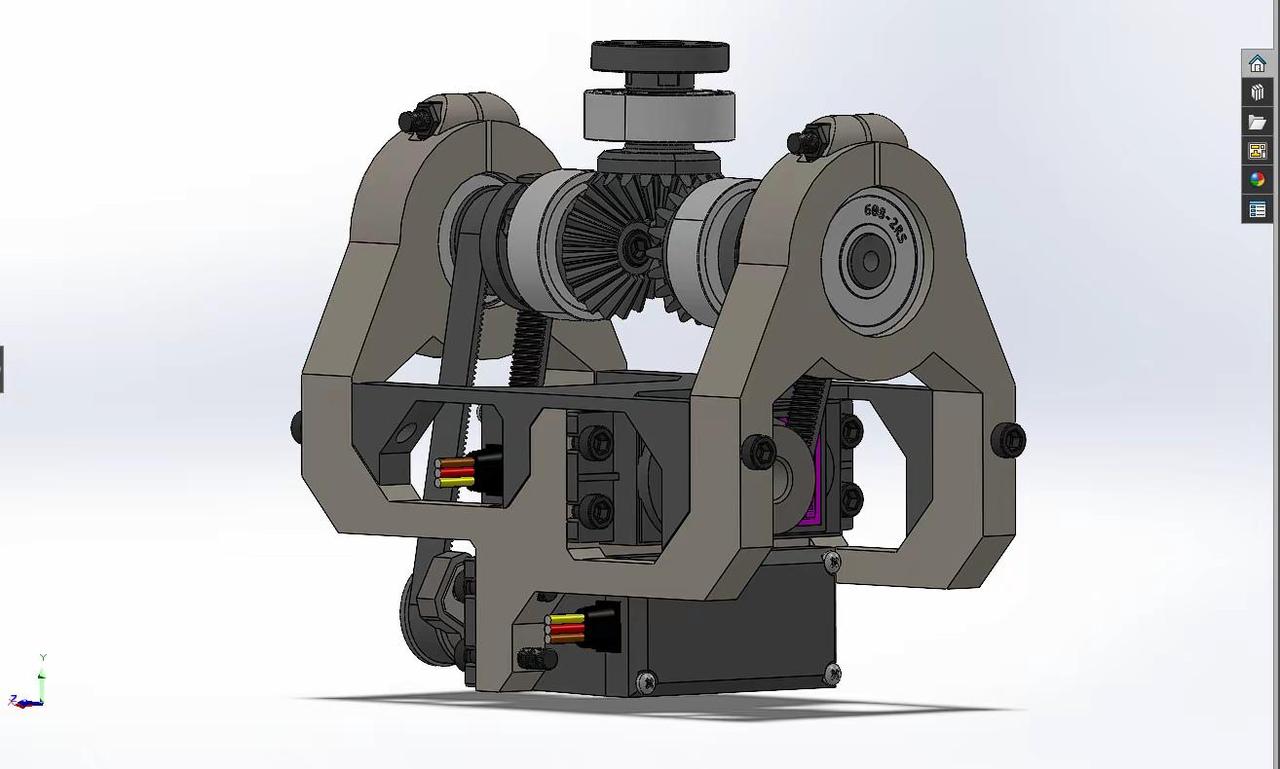
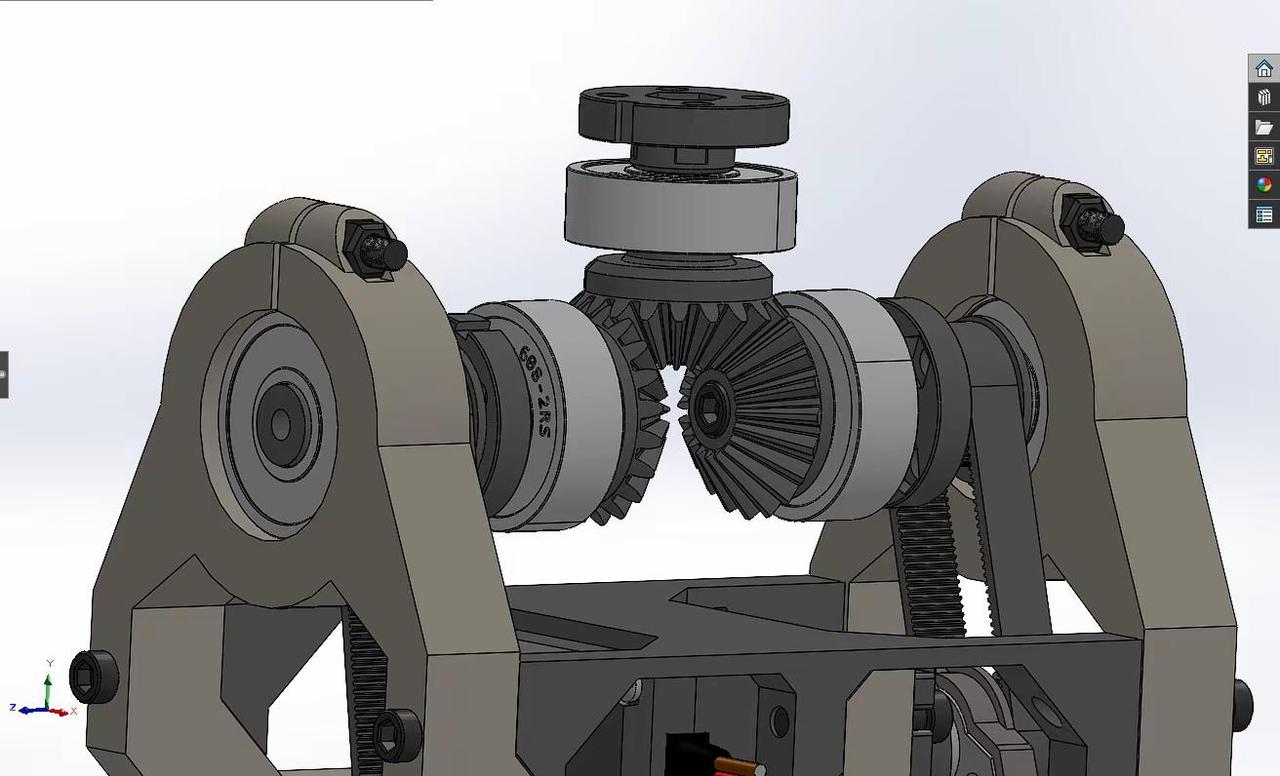
差动齿轮机器人系统设计。差动齿轮机器人系统是一款结构紧凑、完全可3D打印的双自由度(2-DoF)模块,专为机械臂及机器人项目设计。该系统采用差动配置,搭载两个 TowerPro MG996R 高扭矩舵机,可产生协调的双轴运动,非常适用于腕部或肩部关节。动力传输采用 GT2 同步带(带宽 6 mm,节距 2 mm),确保运行平稳且背隙极低;同时配备 8×22×7 mm 轴承,保证在负载下实现稳定、精确的旋转。设计针对标准 M3 螺栓进行了优化,使组装过程简单便捷。
差动齿轮机器人系统设计。差动齿轮机器人系统是一款结构紧凑、完全可3D打印的双自由度(2-DoF)模块,专为机械臂及机器人项目设计。该系统采用差动配置,搭载两个 TowerPro MG996R 高扭矩舵机,可产生协调的双轴运动,非常适用于腕部或肩部关节。动力传输采用 GT2 同步带(带宽 6 mm,节距 2 mm),确保运行平稳且背隙极低;同时配备 8×22×7 mm 轴承,保证在负载下实现稳定、精确的旋转。设计针对标准 M3 螺栓进行了优化,使组装过程简单便捷。