技术巡猎 极氪 车辆偏离车道的纠偏方法及装置。车道纠偏很多人平时开车都遇到过。车稍微往车道线边上压搭到线了,方向盘突然拽一下把车拉回来---安全上当然有用,但体验是吓人的,尤其高速上遇到横风、弯道或者路面不平,系统介入,车身横向一摆,是会让人怀疑人生的。
极氪这件专利解决的不是“车能不能拉回来”这么粗糙的问题,而是“拉回来的时候不要那么生硬”的课题。这套方法的逻辑其实很简单。
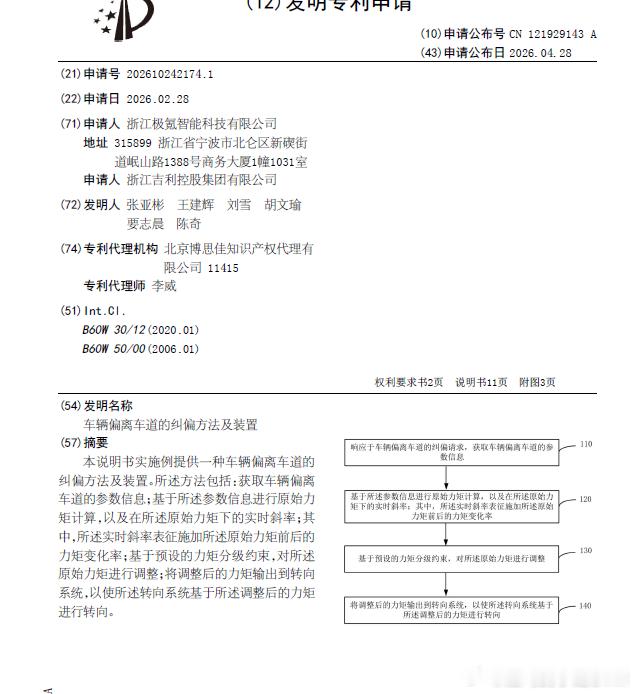
车辆先通过感知系统判断自己是不是偏离车道,比如离车道线还有多远,继续往车道线靠近的速度有多快。专利里把这两个量叫偏离距离和偏离速度。偏得越多,偏得越快,系统当然越应该介入。
传统做法大概是,根据这些参数算一个纠偏力矩,然后直接给到转向系统。问题也在这里。力矩大小只解决“能不能拉回来”,但用户真正敏感的是另一个东西:这个力矩来得有多快。
举个很生活化的例子。有人轻轻扶你一下,你会觉得这是提醒;有人突然拽你一把,你第一反应肯定是惊吓。车道纠偏也是一样。2N·m的转向力矩慢慢加上来,驾驶员可能觉得是自然的;同样的力矩一下子拍到方向盘上,就会变成“系统抢方向”。
所以这份专利引入了一个很有意思的控制量:力矩斜率。
斜率说白了就是力矩变化率,也就是方向盘辅助力矩增加得有多快。也做了力矩分级---可以理解成给纠偏动作设置几个性格档位:L1偏温柔,L2适中,L3更积极。每个档位都有对应的力矩范围和斜率上限。如果系统算出来的原始力矩太猛,斜率超过了当前档位允许的上限,就把力矩压下来,让转向动作落在更舒服的范围里。
这个动作其实会有点像是一个有经验的教练坐在副驾。新手开车快压线了,教练当然要帮你扶方向。但好教练不会上来一把把方向盘打死,而是根据车速、距离、偏移趋势,控制介入力度,车道纠偏要做好的,其实也是这种分寸感。
有意思的是,它还设计了反馈学习。系统完成一次纠偏之后,可以接收驾驶员或者乘客的反馈。比如有人说“太猛了”“吓我一跳”,系统就知道这次介入偏强;如果有人说“怎么还没纠回来”,那可能说明力矩偏弱。除了语音,它还会看驾驶员有没有干预,比如反打方向盘、踩刹车。如果系统刚纠偏,驾驶员马上接管,那大概率说明这次控制动作没有让人放心。
这些反馈会被转成分值,再去调整原始力矩计算公式里的权重参数。也就是下一次再遇到类似场景,系统可以稍微改变介入风格。觉得太猛,就柔一点;觉得太弱,就积极一点。
这里面有个很现实的工程判断:智能驾驶不是只靠一次标定打天下。不同用户对“方向盘帮忙”的接受度差异很大。有的人希望系统果断一点,有的人特别讨厌方向盘有突然动作,宁愿提醒多一点、介入柔一点。固定标定很难照顾所有人,反馈学习至少给了一个个性化调节的入口。
很多智能驾驶功能的好坏,普通用户说不出算法、模型、控制器,但身体是诚实的。对于一些直接的体验,参数表上看不出来,实际开车时好坏非常明显。