人形机器人核心在关节系统,宇树 G1 关节是 “电机 + 减速器 + 传感 + 控制” 的高度集成机电系统,直接决定运动能力上限。
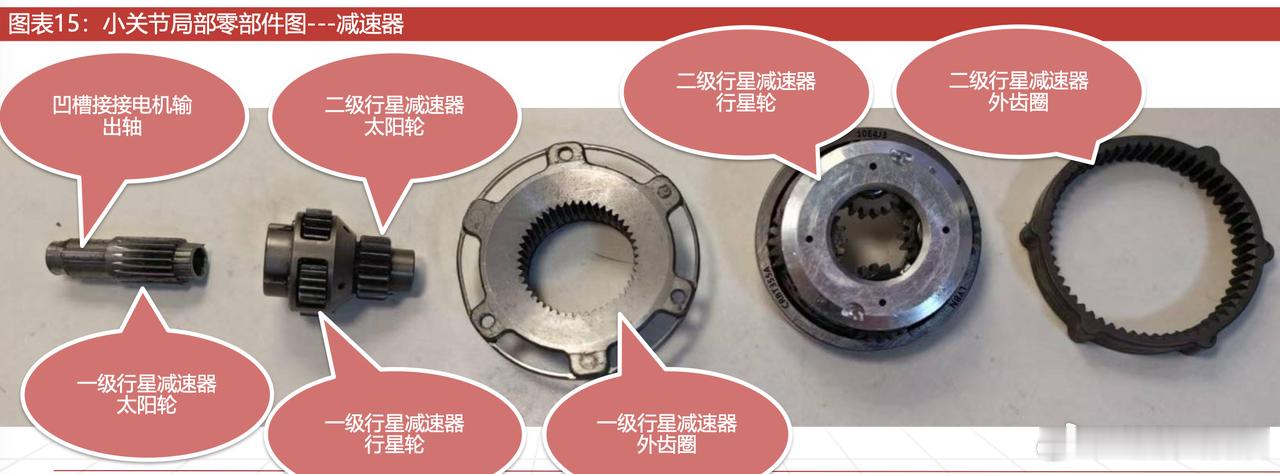
其采用低惯量高速内转子永磁同步电机,搭配二级行星减速器,膝关节最大扭矩 90N・m,适配高频启停工况。
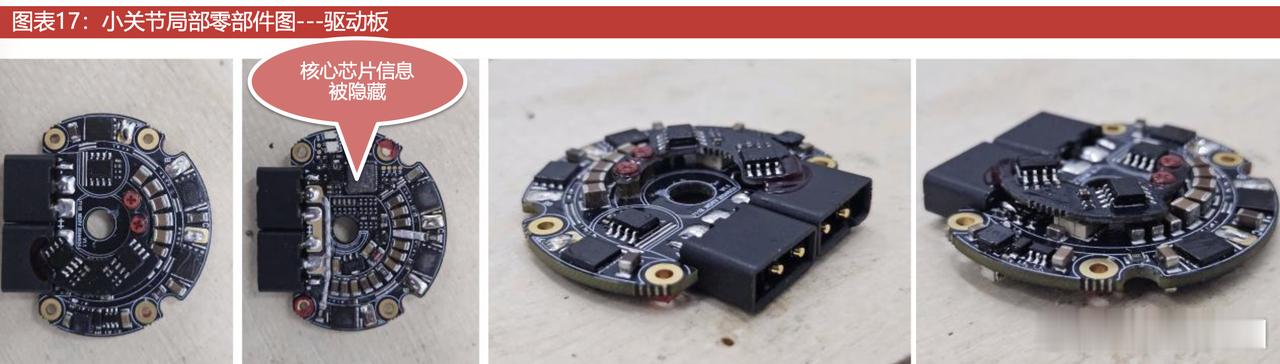
关节高度一体化设计,紧凑轻便且中空内走线,薄壁交叉滚子轴承保障刚性与小型化,配合 FOC 矢量控制 + 双编码器,实现高精度闭环控制。
整体向电驱一体化模块演进,核心聚焦电机、电控及关键机械件,复杂度向电控和算法转移。




人形机器人核心在关节系统,宇树 G1 关节是 “电机 + 减速器 + 传感 + 控制” 的高度集成机电系统,直接决定运动能力上限。
其采用低惯量高速内转子永磁同步电机,搭配二级行星减速器,膝关节最大扭矩 90N・m,适配高频启停工况。
关节高度一体化设计,紧凑轻便且中空内走线,薄壁交叉滚子轴承保障刚性与小型化,配合 FOC 矢量控制 + 双编码器,实现高精度闭环控制。
整体向电驱一体化模块演进,核心聚焦电机、电控及关键机械件,复杂度向电控和算法转移。