没有方向盘的坦克,全靠两条履带 “差速转弯”,但实现方式的不同,直接决定了战场生存力!
🇷🇺 苏联 T-34:简单粗暴的 “离合制动转向”
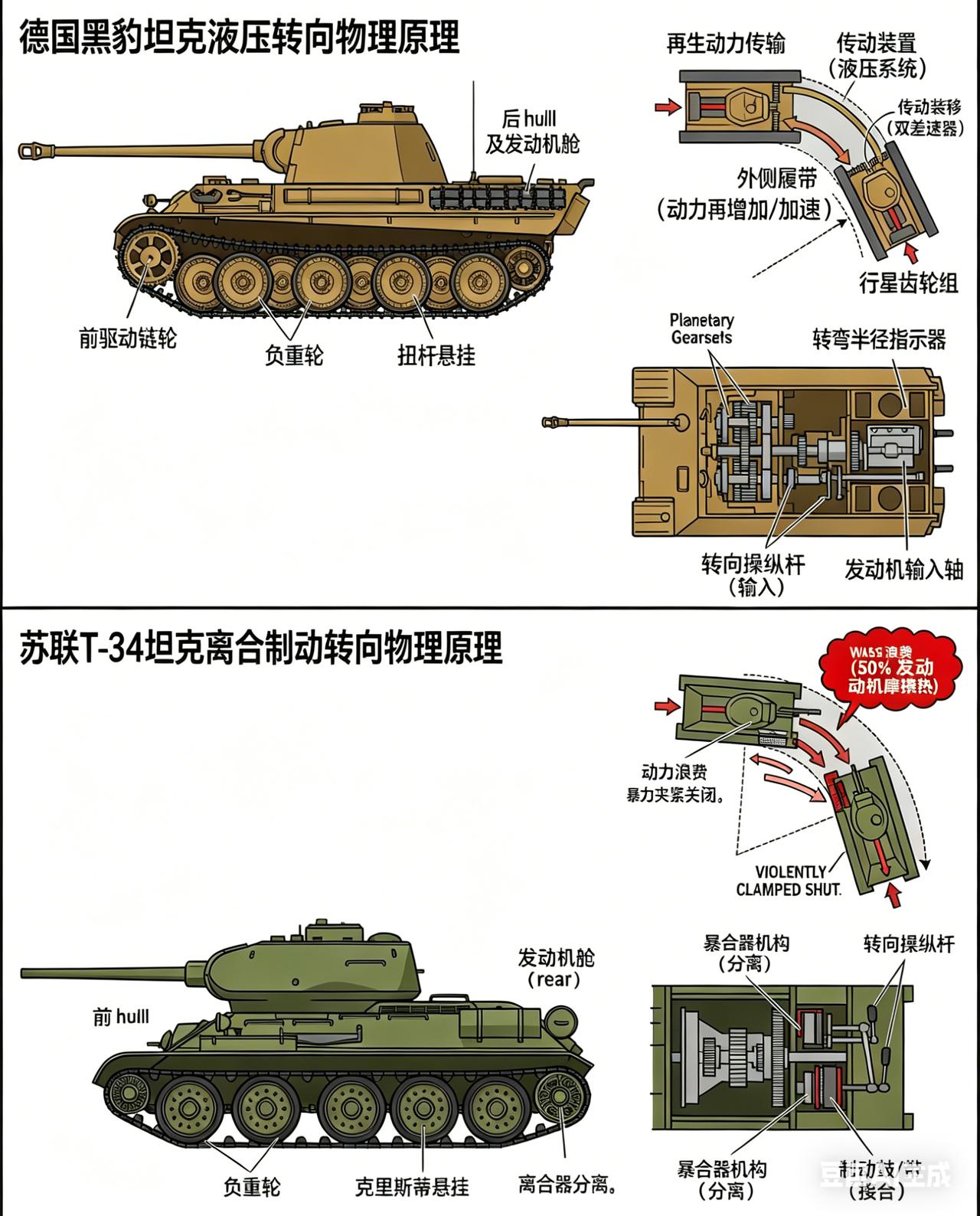
T-34 用的是最原始的离合制动结构:想左转,驾驶员就猛拉操纵杆,把左侧履带完全锁死,靠右侧履带硬拖着车身 “画圈”。这种设计结构简单、好造好修,但代价极大:直接浪费 50% 发动机马力,刹车摩擦产生巨量热量,驾驶员全程要靠蛮力操作,累到虚脱,转弯时坦克完全失去机动性,就是活靶子。
🇩🇪 德国黑豹:黑科技 “双差速液压转向”
德国工程师直接搞出了机械神作:双差速传动 + 液压系统。转弯时不靠刹车,而是用行星齿轮组,把内侧履带的动力,精准 “转移” 到外侧履带上。全程不丢动力、不浪费马力,驾驶员用两根手指就能轻松操控,坦克转弯时依然保持全速,机动性拉满,战场反应快到离谱。
一个是靠蛮力硬拖的 “原始方案”,一个是靠齿轮精准分配的 “天才设计”,两种转向系统,直接拉开了两款坦克的实战上限。两种坦克转向机构利弊总结:
1. 苏联 T-34 离合制动转向
✅ 优点:结构极简、造价低、易生产、维修方便,适合战时大规模量产
❌ 缺点:转弯时锁死单侧履带,浪费 50% 发动机功率,摩擦生热严重,驾驶员操作费力,转弯时机动性完全丧失,易成为活靶子
2. 德国黑豹 双差速液压转向
✅ 优点:动力零浪费,转弯不丢速度,操作轻松顺滑,机动性拉满,战场反应快
❌ 缺点:结构极其复杂,加工精度要求高,造价昂贵,维护难度大,战时量产和后勤压力大