技术巡猎 零跑 驱动系统以及车辆---电车在驱动的时候,电机是在往外输出扭矩,推着车走;可一旦你松油门,或者踩刹车进入能量回收,电机的角色就变了,此时做的是“能量回收”,车轮带动的机械能反过来变成电能送回电池。你可以把它想象成两个人在搬桌子。前一秒两个人还在一起往前推,下一秒其中一个人突然改成往后拉。理论上桌子还是受控的,但现实里,中间总会有一个力重新接上的瞬间。只要这个瞬间处理不好,车里的人就能感受到顿挫。
零跑这份专利,核心思路是在主驱电机从驱动模式切换到能量回收模式的时候,让第二个电机出来“托一把”。而且这个第二电机给的,不是顺着原来方向再推一脚,而是给一个和主驱电机原输出方向相反的补偿扭矩。这个补偿扭矩与第一电机在驱动模式下的输出扭矩旋转方向相反。它的目的,就是让传动部件在切换瞬间不要突然失去连续受力,而是呈线性下降,让能量回收更平滑地介入。
理解起来其实不难。很多车的状态像是:驱动扭矩突然收掉,回收扭矩再重新建立,中间有个“空一下”的过程。虽然这个时间可能很短,但机械系统和人对加减速度变化都很敏感,所以你会觉得被拽了一下。现在零跑的思路是,主驱电机在退出驱动的时候,第二电机马上反向补一个扭矩上来,把这个空档填掉。这样传动链里齿轮、半轴、差速器这些部件的受力变化就不会那么陡,乘客感受到的就不是“断崖”,而更像“斜坡”。
而且它不是单纯说个概念,专利里把几种典型场景都考虑到了。
第一种是直线制动。车子直着开,左右两边驱动情况差不多,这时候两个第一电机的峰值扭矩相同,第二电机给出的补偿扭矩可以平均分给两边。这个很好理解,左右受力对称,补偿也对称,目标就是把直线减速时那种松油门或者轻踩刹车的闯动感压下去。
第二种是弯道制动。这个就比直线复杂了,因为弯道内侧和外侧车轮转速不同,扭矩状态也不一样。专利里提到,曲线制动状态下,弯道内径一侧第一电机的峰值扭矩会大于外径一侧,所以第二电机给的补偿扭矩也不是平均分,而是更多给内侧,少一点给外侧。这个地方就能看出它不是只想把“回收顿挫”做平,它希望在真实驾驶工况里也保持姿态自然。你在弯里减速,最怕的就是左右轮受力变化不合理,打乱车身姿态。能考虑到内外轮差异,说明它在系统层面是往底盘协同那个方向走的。
第三种就更有意思了,是低附着路面。比如一侧轮子压到湿滑路面,抓地力不够,容易打滑。这个时候第二电机的作用又变了。它不再是给反向补偿去平顺切换,而是给同向扭矩,把更多动力送到附着力更好的一侧,帮助车辆脱困。第二电机在这里不是一个只负责“舒适性修边”的零件,而是一个能同时参与平顺性、扭矩分配、脱困控制的系统角色。
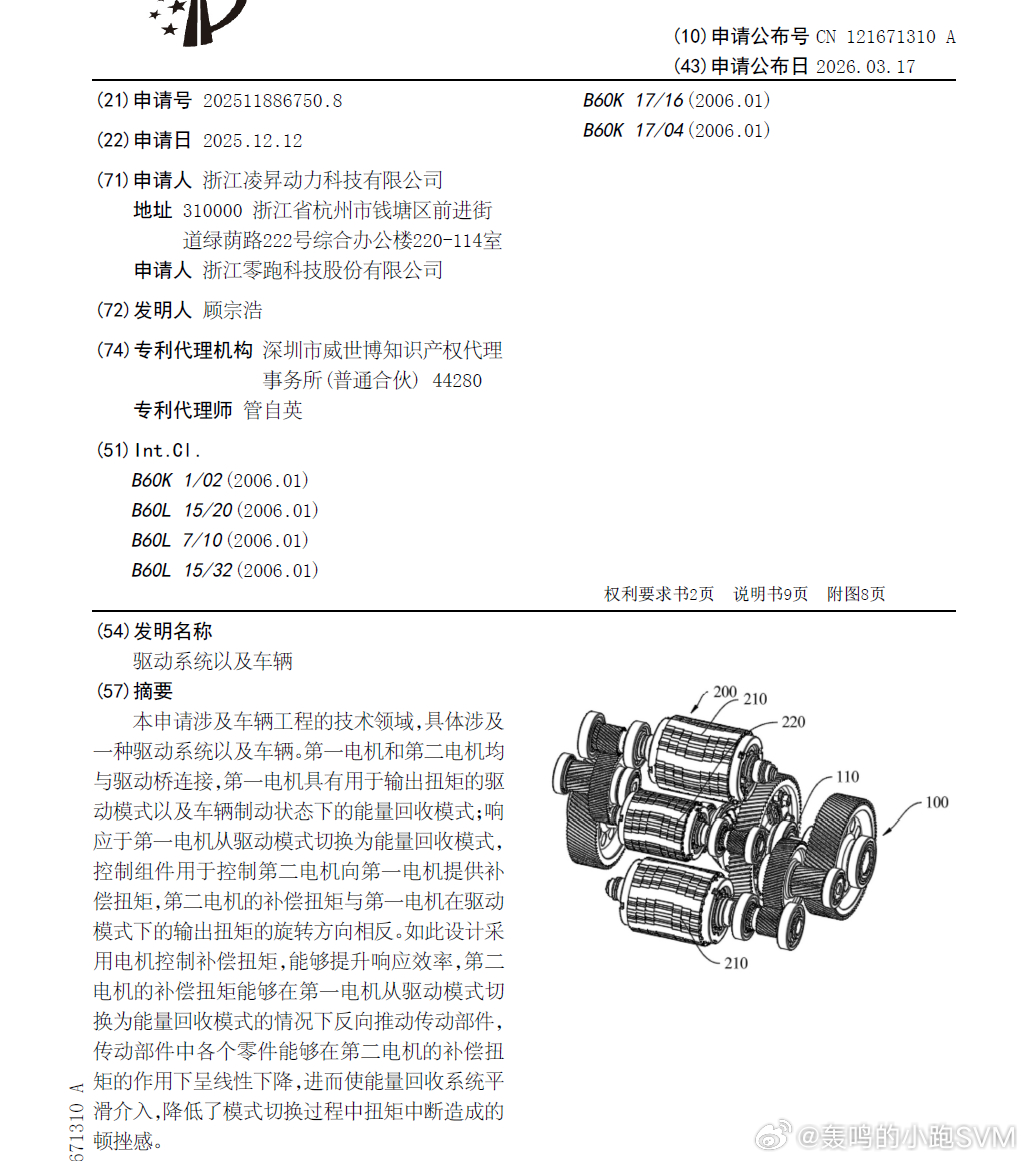
还有一个细节挺有工程味的。第一电机和第二电机接到驱动桥的齿轮组级数不一样,第一传动齿轮组比第二传动齿轮组多一级。别小看这个差异,这其实是在利用机械传动方向变化的规律。齿轮啮合一级,转向就反一次,多一级少一级,最后到车轮端呈现出来的扭矩方向就能不同。也就是说它不是纯靠控制算法硬算出来一个反向补偿,结构本身就为这种扭矩关系做了铺垫。
电车体验竞争,已经越来越不是“功率大不大、零百快不快”这种单点参数竞争了,动能回收这件事,其实是整车高级感的一部分。
只能说,不意外。零跑这两年在很多地方都在做这种事。