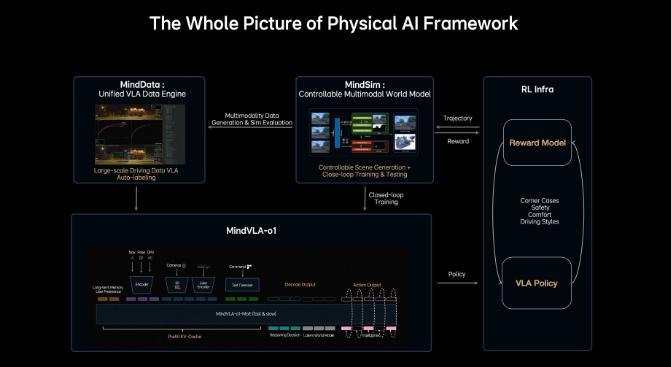
昨天理想汽车詹锟出席了NVIDIA GTC 2026,并发布了下一代自动驾驶基础模型MindVLA-o1。
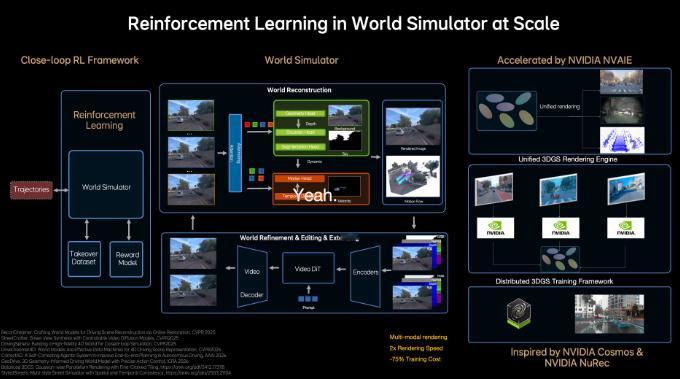
一共是五大创新,此架构是以多模态MoE Transformer为核心,通过3D空间理解、多模态思考、统一行为生成、闭环强化学习和软硬件协同设计
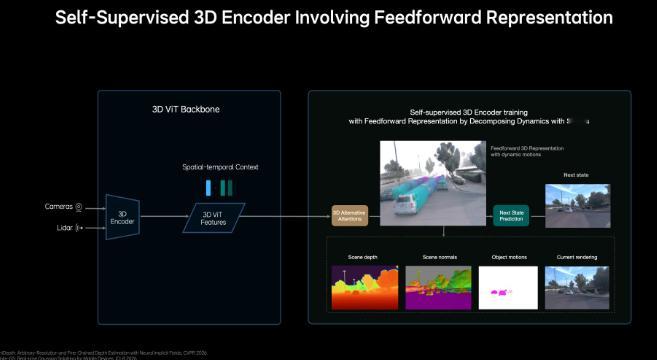
而在感知层面,理想汽车也采用了以视觉为核心的3D ViT Encode,利用激光雷达点云作为三维几何提示,引导模型理解真实空间结构。优势就在于看的更远。
思考层面,也通过了三个阶段训练,用海量视频数据预训练Latent World Token。模型不仅能理解当前场景并进行逻辑判断,还能在隐空间中提前“想象”未来画面。也就是多模态思考。同时,还有行为层面、模型迭代层面等等,理想汽车也做出了更深的思考。
尤其是最后,这个框架不仅服务于汽车,也可扩展至机器人及各种物理系统。带来了更多的可能性理想L9理想i8