最近特斯拉AI副总裁Ashok Elluswamy在ICCV大会上的一次分享,揭开了FSD V14进化的冰山一角。下面是根据BigBite推文的简单整理:
1. 驾驶,为什么必须是端到端?
过去大家总担心端到端是个不可解释的“黑箱”。但Ashok用几个例子点破了传统方案的死穴:
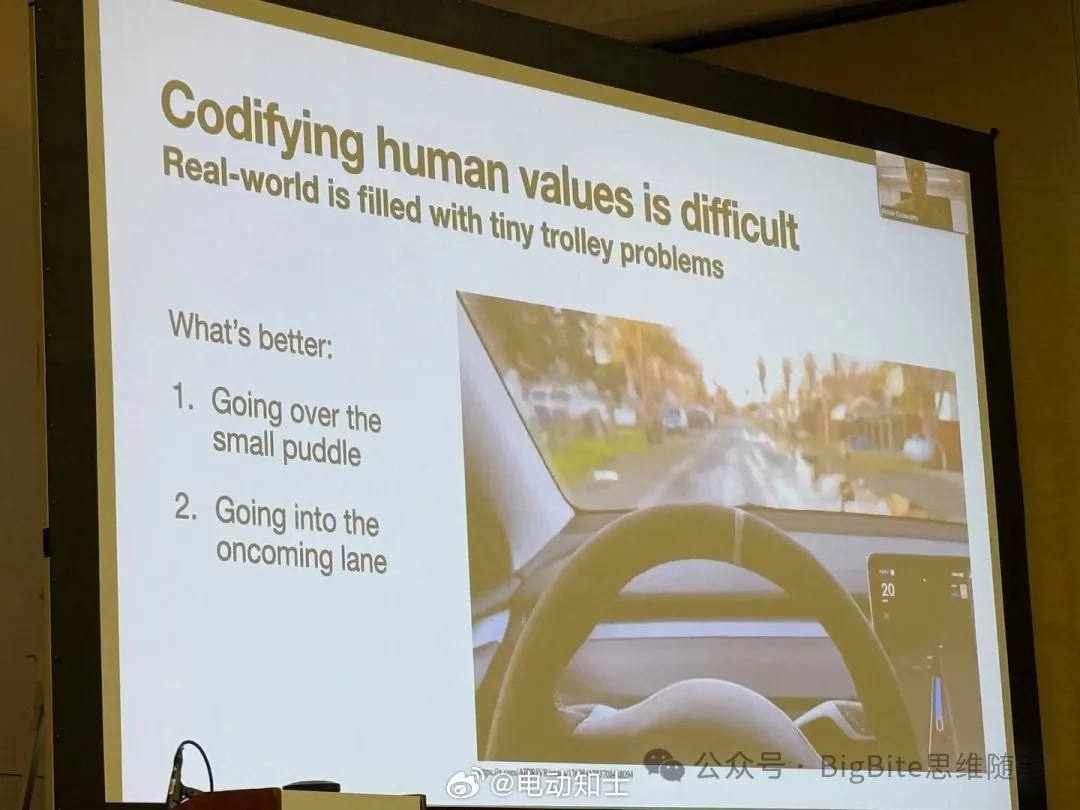
· 规则无法编码人类的价值判断:路上有个水坑,你是压线绕过去,还是死守车道溅自己一身水?这种“人情世故”,规则写不出来,但模型能从海量数据里“悟”出来。
· 接口就是信息瓶颈:传统方案里,感知模块告诉规控模块“那儿有只鸡”。但鸡的意图、姿态这些微妙信息,在传递中都丢失了。端到端,就是让神经网络之间直接“对话”,信息无损直达,决策自然更精准。
2. 如何窥视“黑箱”?——思维链(COT)是关键
这才是这次分享最炸裂的地方。特斯拉的端到端,并不是一个从像素输入到方向盘输出的纯黑箱。它在中间加入了“过程校验”,让AI学会了“思考”。
它会输出一系列中间结果,比如3D空间、动态障碍物,而最关键的是,它能用自然语言来表达决策!
就像分享里的例子,系统不仅识别出“Road Closed”(道路封闭)的牌子,还能进行逻辑推理,用语言文字生成决策:“无法直行,识别到左侧绕行标志,执行左转”。
这已经不是简单的“看见”,而是“看懂”并“想明白”了。这套基于VLA架构的“慢思考”模式,让AI的行为有了可解释性,也正是国内理想、小鹏等头部玩家殊途同归在走的技术路线。
3. 真正的护城河:闭环仿真评测体系
数据再多,模型再牛,怎么知道它行不行?Ashok强调,完善的评测体系,才是端到端系统的核心壁垒。
特斯拉的解法,是基于大算力集群+世界模型的闭环仿真系统。这个系统,是用真实世界的数据“喂”出来的,能高度逼真地模拟现实。它的牛逼之处在于:
· 可以低成本、高效率地验证算法迭代,不用每次都实车跑。
· 可以人为创造各种极端场景(对抗样本),专门测试模型的极限。
· 甚至可以在仿真系统里,获取更完美的“人类驾驶真值”来反哺模型训练。
4. 终局:为物理世界打造通用AI
最后,格局一下就打开了。Ashok明确表示,FSD的这套技术栈,无论是数据引擎、端到端模型,还是闭环仿真,都可以直接迁移到擎天柱(Optimus)机器人上。
所以,特斯拉在做的,早已不只是一套“自动驾驶”系统。它是在为整个物理世界,打造一个可以理解、交互、并做出决策的通用人工智能。这盘棋的终局,远比我们想象的要宏大。
原文: