智元机器人技术革新:灵巧手控制与高效关节模组双重突破!
摘自BTIResearch 人形机器人洞察研究
专利1
关节模组设计:小体积,大能量
需要解决的问题
该专利旨在解决关节模组在一定的尺寸限制下,扭矩依然较小的问题。传统关节模组在人形机器人关节位置的空间有限的情况下,无法提供足够的扭矩,限制了机器人的应用范围。
技术创新点
紧凑的结构设计:通过将转子设置于定子内圈,减小了关节模组的径向尺寸;同时,利用连接套连接转子和第一太阳轮,减小了轴向尺寸。
原文:通过将转子设置于定子内圈,而定子与电机壳固定连接,只需要转子与定子之间留有间隙即可,减小了关节模组的径向尺寸。
多行星轮设计:采用多个第一行星轮和第二行星轮,提高关节模组的扭矩承载能力。
原文:多个第一行星轮,分别与所述第一太阳轮的外圈外啮合;内齿圈,与所述电机壳固定连接,且所述内齿圈的内圈与多个所述第一行星轮的外圈啮合。
高精度编码器:通过多个编码器芯片检测磁性件的磁场变化,实现了对转子绝对位置的高精度检测。
原文:多个编码器芯片,与所述电机壳相对固定设置,并分别与多个所述磁性件相对间隔设置,所述编码器芯片被配置为检测所述磁性件的磁场变化。
技术优势
高扭矩输出:通过将转子设置于定子内圈,减小了关节模组的径向尺寸;同时,利用连接套连接转子和第一太阳轮,减小了轴向尺寸,从而在有限的空间内提高了关节模组的扭矩输出能力。
原文:通过将转子设置于定子内圈,而定子与电机壳固定连接,只需要转子与定子之间留有间隙即可,减小了关节模组的径向尺寸。另外,转子套设在第一太阳轮和第一行星轮的外侧,并利用连接套连接转子和第一太阳轮,减小了关节模组的轴向尺寸。
高精度控制:通过多个编码器芯片检测磁性件的磁场变化,实现了对转子绝对位置的高精度检测,提高了关节模组的控制精度。
原文:多个编码器芯片,与所述电机壳相对固定设置,并分别与多个所述磁性件相对间隔设置,所述编码器芯片被配置为检测所述磁性件的磁场变化。
良好的散热性能:定子套装在转子的内圈,便于定子散热,提高了关节模组的散热效率和额定工作点制。
原文:定子套装在转子的内圈,便于定子散热,提高了关节模组的散热效率和额定工作点。
易于集成:通过减小关节模组的径向尺寸和轴向尺寸,使得关节模组更加紧凑,便于在人形机器人关节位置的空间有限的情况下进行集成。
原文:通过减小关节模组的径向尺寸和轴向尺寸,也便于关节模组的整体集成。
高功率输出:通过增加定子齿的数量,提高了关节模组的功率输出能力。
原文:定子的内圈具有M个定子齿,M为大于或等于24的正整数。通过增加定子齿的数量,可以提高关节模组的功率。
小结和图示
该专利提出了一种关节模组,通过紧凑的结构设计和多行星轮设计,显著提高了关节模组的扭矩输出能力,同时通过高精度编码器实现了对转子位置的精确检测。该关节模组不仅满足了人形机器人在有限空间内的高扭矩需求,还具有良好的散热性能和易于集成的特点。
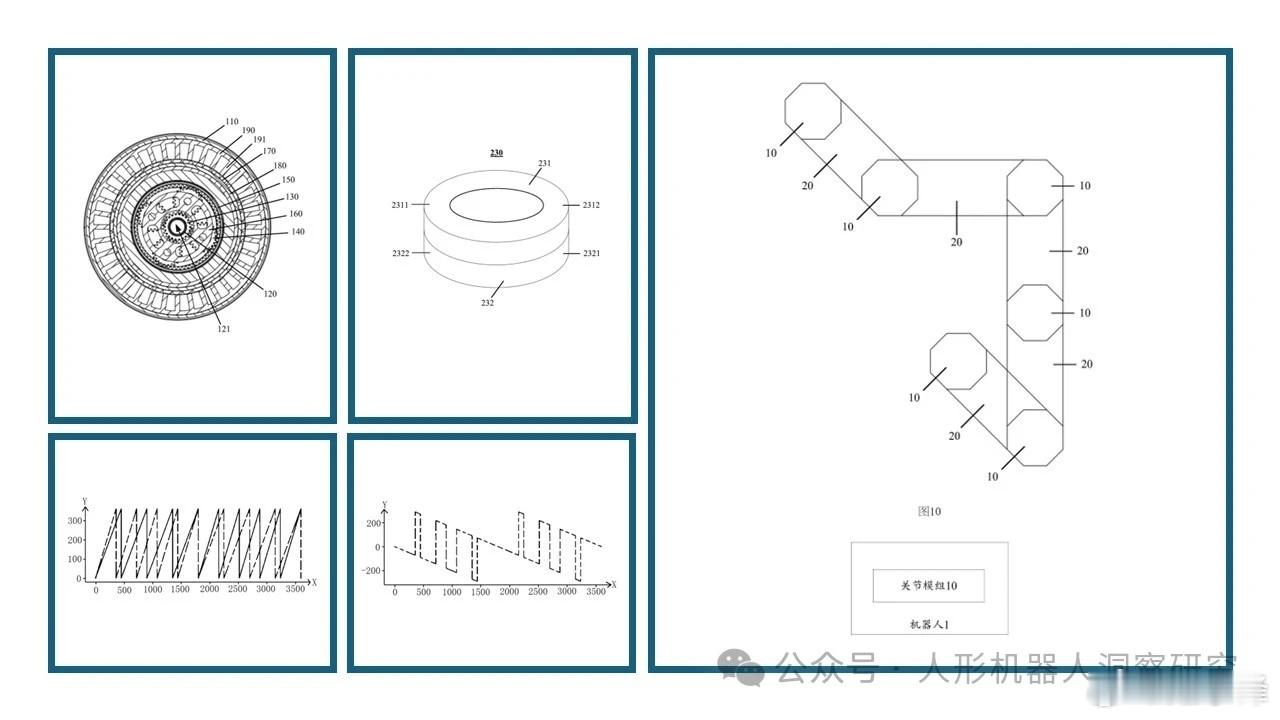
图中: 1、机器人;10、关节模组;110、电机壳;111、壳体;112、端盖;120、中心轴;121、通 孔;130、第一太阳轮;140、第一行星轮;150、内齿圈;160、第一行星架;170、转子;180、连接 套;181、第一连接部;182、第二连接部;183、第三连接部;190、定子;191、定子齿;200、中心 齿轮;210、支撑件;220、检测齿轮;230、磁性件;231、第一环形磁性部;2311、第一环形磁性 部的北极;2312、第一环形磁性部的南极;232、第二环形磁性部;2321、第二环形磁性部的北 极;2322、第二环形磁性部的南极;240、编码器芯片;250、减速组件;251、第二太阳轮;252、 第二行星轮;253、第二行星架;310、第一轴承;320、第二轴承;330、第三轴承;340、第四轴 承;350、线路板;20、转接件。
专利2
灵巧手控制方法:让机器人手“活”起来
需要解决的问题
该专利旨在解决灵巧手通用性差的问题。传统灵巧手只能完成特定的指令,实现特定的动作,例如握拳、伸展手指等,无法灵活适应多种任务需求。
技术创新点
遥操作数据的接收与处理:灵巧手控制方法通过接收遥操作数据(包括目标位置数据和/或目标角度数据),并基于第一映射关系确定驱动电机的目标角度,从而实现对灵巧手的精确控制。
原文:接收遥操作数据,所述遥操作数据包括目标位置数据和/或目标角度数据,所述目标位置数据用于表征遥操作设备输入的所述手指的目标位置的数据,所述目标角度数据用于表征所述遥操作设备输入的所述关节的目标角度的数据。
多关节协同控制:通过碰撞检测算法和触觉传感器,确保多个手指在运动过程中不会发生碰撞,并能根据受力情况调整动作。
原文:基于碰撞检测算法和多个所述关节各自的所述目标角度进行碰撞检测,确定碰撞检测结果;在所述碰撞检测结果为有碰撞的情况下,控制所述驱动电机的状态不变。
缩放系数的应用:通过缩放系数对目标位置数据进行处理,以适应不同尺寸的灵巧手和遥操作设备。
原文:基于缩放系数,对所述目标位置数据进行缩放处理,得到缩放后的目标位置数据。
技术优势
高通用性:通过接收遥操作数据并基于第一映射关系确定驱动电机的目标角度,实现了对灵巧手的精确控制,使得灵巧手能够完成各种动作,如取放物体、按动开关、开关门、穿针引线等。
原文:实现了利用遥操作设备控制灵巧手实现各种动作,例如,取放物体、按动开关、开关门、穿针引线等,提高了灵巧手的通用性。
精确控制:通过目标位置数据与目标角度数据之间的映射关系,以及驱动电机的目标角度与关节的目标角度之间的映射关系,能够精确求解关节的目标角度,从而实现对灵巧手的精细控制。
原文:基于目标位置数据与目标角度数据之间的映射关系和目标位置数据,求解关节的目标角度,确定求解结果化。
适应性:通过缩放系数对目标位置数据进行缩放处理,使得遥操作设备的运动范围与灵巧手的运动范围相匹配,提高了系统的适应性。
原文:基于缩放系数,对所述目标位置数据进行缩放处理,得到缩放后的目标位置数据。
安全性:通过碰撞检测算法和触觉传感器,确保多个手指在运动过程中不会发生碰撞,并能根据受力情况调整动作,避免损坏灵巧手。
原文:基于碰撞检测算法和多个所述关节各自的目标角度进行碰撞检测,确定碰撞检测结果;在所述碰撞检测结果为有碰撞的情况下,控制所述驱动电机的状态不变。
该专利提出了一种关节模组,通过紧凑的结构设计和多行星轮设计,显著提高了关节模组的扭矩输出能力,同时通过高精度编码器实现了对转子位置的精确检测。该关节模组不仅满足了人形机器人在有限空间内的高扭矩需求,还具有良好的散热性能和易于集成的特点。
图中: 1、机器人;2、主体;3、灵巧手;31、手掌;32、手指;321、关节;322、指节;33、驱动电 机;4、控制器;5、遥操作设备。