【知识科普】机器人传感器的主要类型及应用!
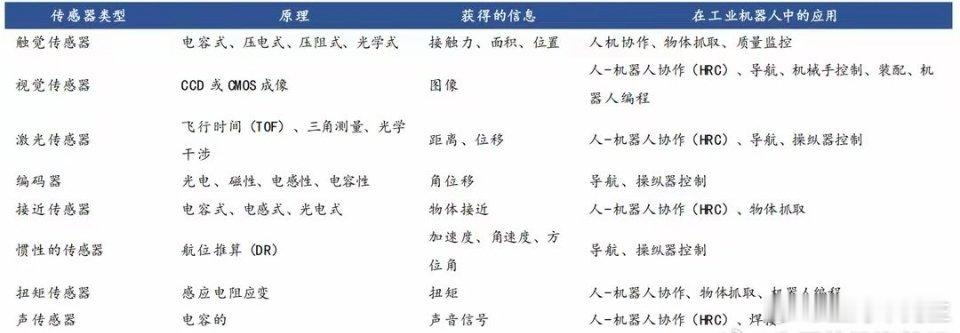
在人形机器人中,传感器的应用范围广泛,涵盖了机器人的各个部位和功能。以下是几种主要传感器类型及其在人形机器人中的应用:
力觉传感器:主要应用于人形机器人的手腕、脚踝等末端执行器部位,用于精确控制机器人与外界的力交互。例如,在抓取物体时,力觉传感器能够实时反馈抓取力度,避免损坏物体或因抓取不稳导致物体掉落。
视觉传感器:通常安装在机器人头部或其他需要视觉感知的部位,用于实现机器人的视觉功能,如物体识别、导航、避障等。3D视觉传感器因其高精度和大信息量的特点,成为未来人形机器人视觉方案的主流选择。
触觉传感器:主要应用于机器人的手部、脚部或其他需要与外界直接接触的部位,用于感知接触力和物体表面的纹理等信息。电子皮肤技术的发展使得机器人能够实现更加精细的操作和交互,如抓取易碎物品或进行复杂的物体操作。
惯性传感器:安装在机器人的身体内部,用于测量机器人的加速度、角速度等运动状态信息,为机器人的导航和姿态控制提供数据支持。
编码器:广泛应用于机器人的各个关节部位,用于测量关节的位置和速度,为机器人的运动控制提供精确的反馈信息。编码器的精度和可靠性直接影响机器人运动的准确性和稳定性。