这条微博聊一聊蔚来的 AES。
它属于你感知不明显,但是「用一次就感激一生的功能」。
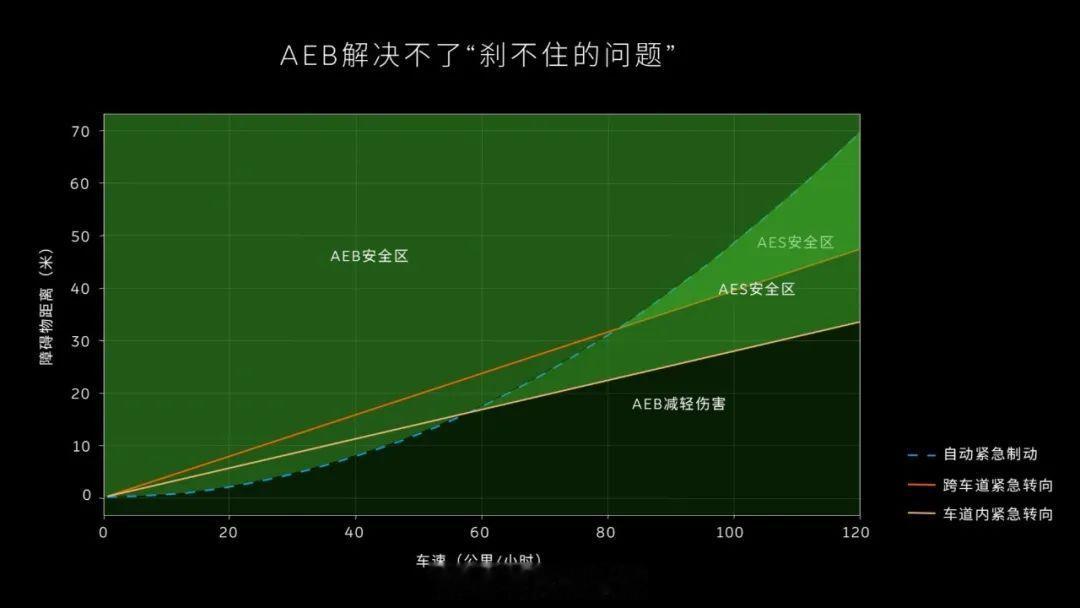
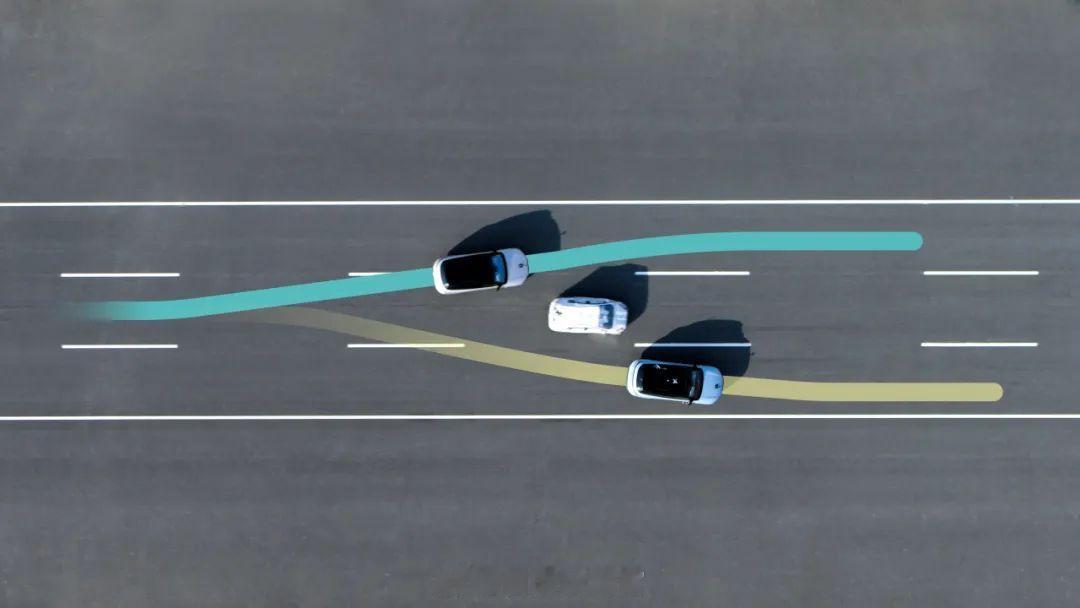
在蔚来前不久推送的智能系统「Banyan 榕 3.1.0」中,增加了一项全新的智能安全辅助功能——「自动紧急避让 AES」,可以在前方制动距离不足、但临侧具备可紧急变道的空间条件下,通过横向避让实现风险的躲避。
具体来说,蔚来 AES 可触发速度区间是 60-150 km/h,针对五大场景:
- 高速追尾场景。
- 对向逆行场景。
- 二轮车、行人横穿场景。
- 前车紧急切出场景。
- 夹心追尾场景。
总体来说,蔚来「自动紧急避让 AES」做到了「主动识变、应变求变」,既能在高速工况下进行紧急避险,也能在中低速工况下进行主动闪躲,充分挖掘出避让的优势。
相对于 AEB 来说,它的难点其实更大,可以说是「智能安全的技术塔尖」。
为啥这么难?
原因有三:
1、验证周期长。
2、验证成本高。
3、对误触发有极为苛刻的要求。
基于此,蔚来肯定是要反复验证,反复测试,花了大量的时间、人力、物力和精力,最终推出了 AES 功能。
具体来说,蔚来在「自动紧急避让 AES」推送前,首先在云端进行了 20 亿公里累积的事故数据的大规模测试验证,并在车端全场景下进行 6 个月超过 3 亿公里的功能运行测试,确保功能得到充分的复杂真实场景的长里程验证。
蔚来「自动紧急避让 AES」在触发速域、识别对象、场景覆盖上,均处于行业领先地位,并有三个「行业唯一」。
- 行业唯一「覆盖中低速至超高速范围」。
- 行业唯一「响应行人鬼探头」。
- 行业唯一「实现夹心场景下防被追尾」。
可惜的是,「自动紧急避让 AES」作为智能安全领域的一项全新功能,在用户中的认知是薄弱甚至是陌生的。但是,蔚来推送「自动紧急避让 AES」功能,并非是为了炫技,而是在自身智能安全产品节奏下的合理推进。
但我还是要说,这个功能,其实平常不一定能用到,但是它在关键时刻确实能够救命——它属于你感知不明显,但是「用一次就感激一生的功能」。
这就是蔚来,做得比说得多,有时候确实有点「吃力不讨好」。
但我个人还是要肯定,因为智能驾驶发展到今天,人们还是需要不断探索它如何赋能于人们的价值;蔚来其实已经做了很多,包括对于端到端大模型技术的拥抱——只是这些努力还需要更多的时间被人们看到,被人们感知到。
AES 就属于此类。
最后说一句,科技以人为本——大家还是需要共勉。