英文题目:Microscopic robots that sense, think, act, and compute
中文题目: 能感知、思考、行动和计算的微观机器人
作者:Maya M. Lassiter, Jungho Lee, Kyle Skelli, Li Xu, Lucas Hanson, William H. Reinhardt, Dennis Sylvester, Mark Yim, David Blaauw, Marc Z. Miskin(通讯)
作者单位: 宾夕法尼亚大学、密歇根大学
期刊:Science Robotics(IF 27.5 中科院一区,JCR一区)
发表时间:2025年12月10日
链接:https://doi.org/10.1126/scirobotics.adu8009
引文格式:Lassiter M M, Lee J, Skelli K, et al. Microscopic robots that sense, think, act, and compute[J]. Science Robotics, 2025, 10: eadu8009.
01 全文速览
把机器人做小不难,但要在亚毫米尺度上同时集成感知、计算、驱动和通信,让它们像宏观机器人一样“自主”,40年来一直是挑战。原因很直接:电源、电路、执行器,这些系统的功耗和尺寸关系随尺度缩小而急剧恶化。
宾夕法尼亚大学和密歇根大学的研究团队这次给出了一个让人眼前一亮的答案。他们制造出了体积仅 210 × 340 × 50 微米的微观机器人,这个尺寸和单细胞生物相当。但在这个比头发丝还细的空间里,他们塞进了一个完整的计算系统:光伏电池供电、温度传感器感知、处理器运算、存储器编程、四个电极驱动运动,还能接收光信号指令。
这个机器人不是简单的遥控玩具。它有一个真正的处理器,支持11位指令集,可以执行算术运算、条件分支、数据读写,还能用运动状态把温度数据编码发回给操作者。最关键的是,它是可编程的——通过不同波长的LED,可以随时改写机器人内存里的程序,让它执行不同的任务。
核心亮点:
✅极致集成:210×340微米内集成处理器、存储器、传感器、光伏电源、驱动器和通信模块
✅真正可编程:11位指令集,支持算术、分支、数据读写,可随时通过光信号重写程序
✅闭环行为:能感知温度,根据感知结果改变运动模式,实现梯度搜索
✅独立寻址:每个机器人有独立密码,同一视野内可单独控制不同机器人
✅批量制造:采用CMOS工艺,一次流片可产出成千上万个机器人,成本可低至1美分
02 研究内容🔬机器人长什么样?
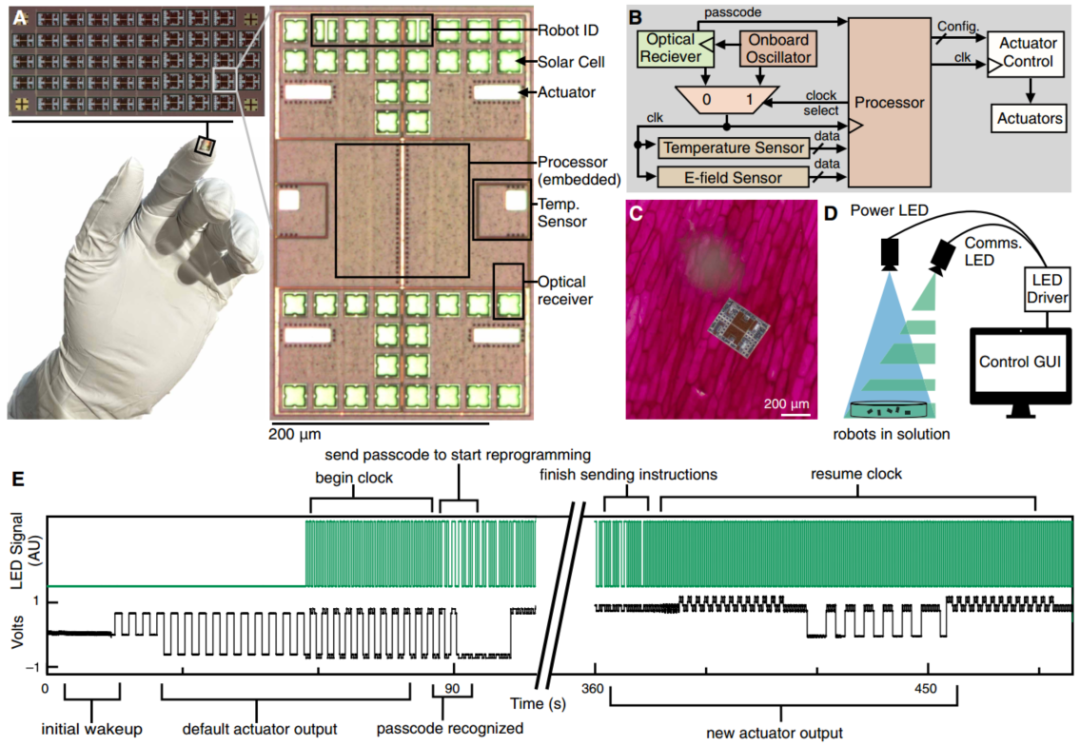
图 1. 微型机器人电路概述。 (A) 大约 100 个微型机器人组成的毫米级芯片,放置在戴手套的指尖上。每个微型机器人都包含多个微电子集成部件,涵盖传感、内存、处理、通信和电源(比例尺,200 μm)。这些器件在商业代工厂采用 55 nm CMOS 工艺一起制造,并针对尺寸和功耗进行了优化。 (B) 描述机器人子系统之间数据移动的流程图。处理器使用来自传感器和通信系统的传入信息来更新执行器输出。 (C) 植物细胞顶部的机器人的合成照片,以显示比例(比例尺,200 μm)。 (D) 示意图,说明外部 LED 如何使用光为机器人供电和编程。为了发送指令,自动编译器调制通信 LED 的光功率,每个闪存在程序中编码一个位。 (E) 实验数据显示机器人对光传输的响应。为了防止随机光波动干扰机器人的操作,通信协议采用了密码序列,微型机器人必须看到该密码序列才能接受传入的程序,将数据存储到内存中并执行。
图1C把机器人和植物细胞放在一起比大小。机器人尺寸 210×340×50 微米,跟单个细胞差不多。这么小的空间里,他们用55纳米CMOS工艺集成了:
- 光伏电池(供电)
- 温度传感器
- 处理器
- 存储器(32条指令存储 + 16字节数据存储)
- 光学接收器(接收指令)
- 四个铂电极(驱动运动)
图1A是一颗毫米级芯片放在指尖上的照片,一颗芯片上集成了大约100个这样的机器人。
🧠怎么编程和通信?
图1D展示了整个系统的工作原理:两个不同波长的LED,一个持续照射给机器人供电(光伏电池),另一个闪烁发送指令。机器人上的光学接收器检测到特定“密码”后,就开始接收后续的光脉冲,把指令写入内存。
指令集是11位的,一共支持19条指令(表2)。分成两类:
- 常规计算指令:mov(数据移动)、add/sub(加减)、and/or(位运算)、sll/srl(移位)、cmp(比较)、beq/bne/bgt/blt(条件分支)
- 机器人专用指令:mot(运动控制)、ts(温度感知)、wav(通信输出)
关键设计是,专用指令执行时会暂停处理器,但从程序员角度看像单周期完成。这样可以把复杂行为压缩成少数几条指令,节省宝贵的内存空间。
🤖怎么运动?
机器人靠电渗流驱动。给四个铂电极施加不同电压组合,可以在溶液中产生电场,推动机器人移动。不同的电极极性组合,会产生不同的运动模式:
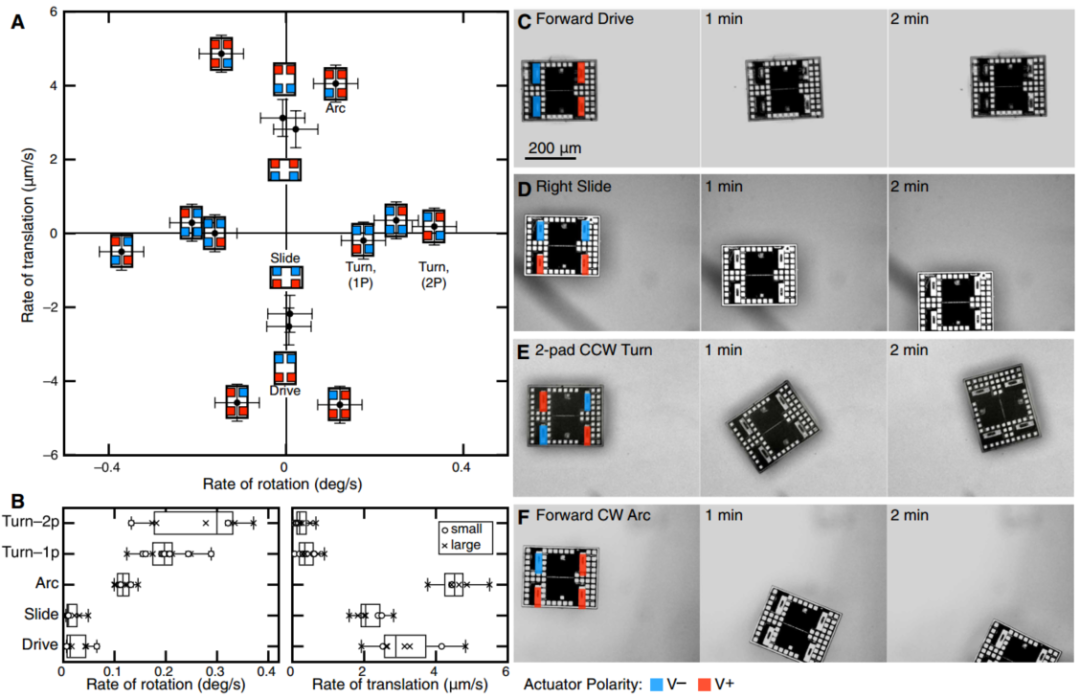
图2. 可重新编程的运动。 (A) 机器人的运动自由度,即其带符号的旋转速率和前进速度,取决于电流通过其电极而在溶液中产生的电场。通过设置不同的电极极性(红色、正极和蓝色、负极),我们生成了四类机器人运动:沿长轴和短轴的平移、转动以及旋转平移(此处称为弧线)。可以通过将一个电极高举(表示为 1P)或沿对角线高举两个电极(表示为 2P)来实现转弯。机器人的运动通常遵循对称性,状态的不同仅在于旋转或反射产生相似的速度和旋转速度。数据点对应于各个实验(总共 14 个),误差线量化了显微镜漂移和环境流体流动的系统不确定性。 (B) 机器人运动的详细统计数据显示了 56 个独立实验中设备间的差异。方框跨越四分位数范围,中间有一条垂直线;水平条跨越最小-最大范围。两种机器人尺寸(大和小)收集的数据没有显示出显着差异。 (C 到 F) 2 分钟内四个代表性身体动作的蒙太奇。比例尺,200 μm。
图2A展示了四类运动:
- 平移(沿长轴或短轴)
- 旋转(顺时针/逆时针)
- 弧线(边转边走)
总共有14种有效配置。图2C-F是四种典型运动的连续照片,每张间隔1分钟。
图2B是56次实验的统计结果。平移速度约 3–5 微米/秒,旋转速度约 0.1–0.3 度/秒。不同机器人之间有一定差异,但两个尺寸版本的机器人表现没有明显区别。
🌡️怎么感知和反馈?
他们用温度传感器做了两个闭环行为验证。
任务一:温度报告
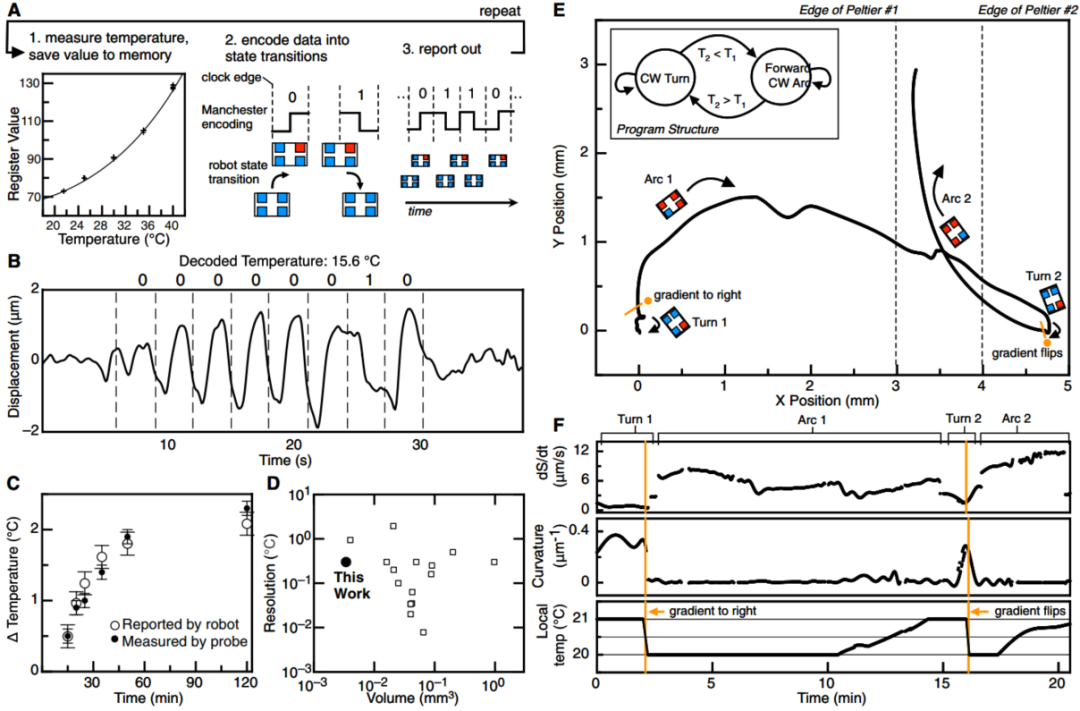
图3. 由传感器反馈控制的运动。 (A) 一个程序,用于感测温度并使用曼彻斯特编码的运动信号传输结果。机器人对温度进行采样,并为每个读数编码一个 8 位寄存器值。绘制的十字符号代表单个机器人在已知温度下的单独测量结果,没有误差线,用于校准机器人之间的传感器变化。总共 42 个测量值,每个温度约 5 个(参见相应的数据集)。(B) 机器人通过移动质心来发送数据,我们对此进行了跟踪和解码。传输包含以已知频率发送的 8 位,可以分段为时间窗口(虚线),每个时间窗口包含一个转换。根据信号是高电平还是低电平来确定位数,然后转换为十进制。 (C) 通过将机器人放入温水浴中,我们可以将它们的测量结果(空心圆圈)与探针测量的结果(实心圆圈)进行比较,发现一致。误差线反映了机器人(量化限制,~0.3°C,全宽)和探头的分辨率;与地面真实情况的偏差约为 0.2°C。 (D) 我们的结果和现有作品 (16, 26–38) 的温度分辨率与总体积(详细信息见表 S1)。 (E) 攀登温度梯度的程序。当温度降至先前记录的值(插图)以下时,机器人会通过执行电弧运动来探索环境,或者转动到位以保持其位置。当施加热梯度时,机器人会形成弧线,直到到达较温暖的区域,然后切换到转向。逆转梯度会导致机器人恢复电弧放电。 (F) 曲率、速度和热成像估计的局部机器人温度证实,转变是响应新的局部温度测量而发生的。
图3A展示了程序流程:机器人用ts指令测量温度,把结果存到寄存器,然后用wav指令把数据通过曼彻斯特编码发送出去——怎么发?通过切换电极极性,让机器人身体摆动,用运动轨迹编码数据。图3B是解码过程,接收端把运动轨迹恢复成二进制位流。
图3C是把机器人放在慢慢升温的溶液里,连续测量并与热电偶对比。结果基本吻合,误差约0.4度(线性校准)或0.2度(批量二次校准)。
图3D把他们的传感器与文献中的各种数字温度传感器做了对比(分辨率 vs 体积)。他们的传感器在 <1 mm³ 的体积下达到0.3度分辨率,在帕累托前沿上处于领先位置。
任务二:温度梯度爬升
图3E是更复杂的闭环行为。他们用帕尔贴泵在溶液里制造温度梯度,编程让机器人执行一个简单的规则:
- 如果当前温度比上次低 → 切换到“弧线”模式(边转边走),探索空间
- 如果当前温度比上次高 → 切换到“旋转”模式(原地转),留在温暖区域
实验开始时,机器人原地旋转。打开制冷后,它切换到弧线模式,往远处移动。当它进入温暖区域后,又切回旋转模式。反转温度梯度后,它重新开始探索。
🏭怎么制造出来的?
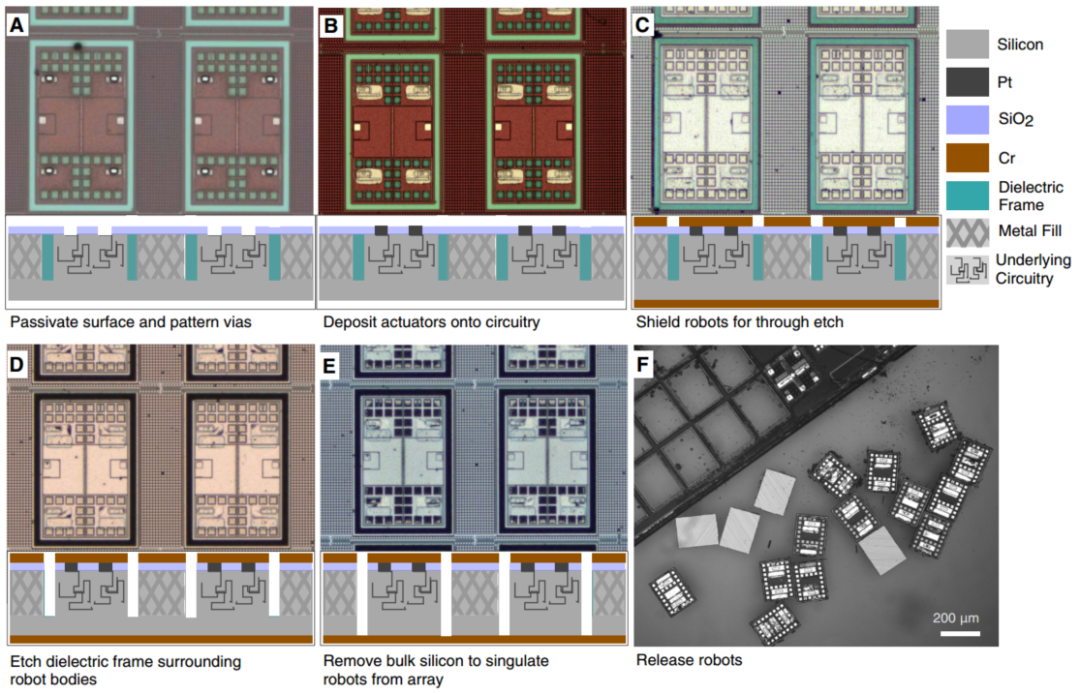
图4. 集成制造和发布。我们使用以下步骤将铸造厂制造的晶圆转变为机器人。 (A) 我们使用氧化物层和与底层电子器件的图案化金属互连来钝化表面。 (B) 执行器被放置,然后通过互连连接到电子设备。剩下的步骤释放机器人(C),首先用金属硬掩模屏蔽它们,然后(D)蚀刻晶圆的氧化层,(E)最后去除下面的硅。 (F) 完成后,去除硬掩模层,将机器人整体释放到溶液中。典型的产率约为 50%。比例尺,200 μm。
图4展示了制造步骤:
1. 在CMOS晶圆上完成所有电路
2. 将晶圆背面减薄到50微米
3. 沉积和刻蚀铬层(做掩膜和刻蚀阻挡层)
4. 从正面刻蚀氧化物到硅衬底
5. 深反应离子刻蚀穿透硅片,停在背面铬层
6. 湿法腐蚀掉残留铬,释放机器人到溶液中
典型良率超过50%。
成本方面,他们估计批量生产时每个机器人成本可低至1美分。
03 创新点①计算系统首次集成到亚毫米尺度
之前也有带电子电路的微型机器人,但那是简单的状态机,只能执行固定的、硬件写死的动作。这个工作是第一次在200微米尺度上放进一个真正的、可编程的处理器。它有完整的指令集、存储器、算术逻辑单元,可以执行分支、循环、条件判断。这意味着同一个机器人可以在不同任务间切换,而不用重新制造。
②专用指令集压缩代码量
内存只有几百比特,常规的通用指令集根本装不下完整程序。他们设计了一套混合指令集:常规计算指令(mov/add/sub)和机器人专用指令(mot/ts/wav)混在一起。专用指令把几十上百条普通指令才能完成的复杂行为(比如“用运动波形发送温度数据”)压缩成一条指令。这是让有限硬件跑出复杂功能的关键。
③用身体运动做通信
他们没有额外加通信模块,而是直接用已有的驱动电极,通过改变运动状态来发送数据。wav指令把寄存器里的数据用曼彻斯特编码调制成电极极性切换序列,机器人身体的摆动轨迹自然就成了信号。这个想法很巧妙,用已有的硬件实现了新功能。
④闭环行为演示
温度报告和梯度爬升两个实验,虽然行为简单,但意义在于它们是闭环的:感知→计算→行动。这是“自主”的核心定义。之前的微型机器人要么只能遥控,要么只能执行开环动作,这是第一次在亚毫米尺度上演示完整的感知-计算-行动闭环。
⑤独立寻址和并行控制
每个机器人出厂时有一个硬编码的密码。发送指令时先发密码,只有密码匹配的机器人才会接收后续指令。这意味着在同一视野里,可以单独控制不同的机器人做不同的事。视频S4里就演示了两个机器人执行不同序列的动作。
04 总结与展望这个工作的意义不在于把单个指标推到极致(速度不快,力量不大),而在于第一次在微生物尺度实现了“机器人”的完整定义:能感知、能计算、能行动,而且这些功能是集成在同一个微小载体上的,不是靠外部设备操控的。
从应用角度看,这种机器人的价值在于不需要专用设备。很多微型机器人需要磁场线圈、超声波阵列、特殊培养环境,而这些机器人只需要一束可控的光。光可以同时给所有机器人供电,可以用密码独立寻址,可以随时重写程序。这意味着在一个简单的显微镜+LED平台上,就可以进行复杂的多机器人实验。
未来研究将聚焦于以下几个方向:
🔸更复杂的程序:目前只有几百比特内存,能写的程序很短。如果用更先进的工艺节点(同时保持高阈值电压抑制漏电),内存可以扩大100倍,能跑几千行代码,实现更复杂的自主行为。
🔸更快的运动:目前速度只有几微米每秒,因为工作电压太低(~1V)。如果提高到水解电压附近(~2V),电流会指数增长,速度可以提高到毫米每秒量级(他们之前的工作已经验证过)。
🔸更多样的驱动:除了电渗流,这套电子系统也可以驱动其他类型的微执行器,比如形状记忆合金、电化学气泡驱动器,适应不同的工作环境(比如生理盐水)。
🔸多机器人协同:现在已经有独立寻址,下一步可以设计简单的“领导-跟随”规则,让一群机器人协作完成任务。即使没有机间通信,通过全局光信号也能实现一定程度的协调。
🔸功能扩展:除了温度传感器,可以集成其他传感器,比如pH、光强、生物标记物。配合可编程性,可以做成能在体内自主响应的药物释放微机器人。
🔸规模化制造:目前的良率已经超过50%,成本估算1美分。如果进一步优化工艺,真正实现“撒一把机器人出去干活”的场景,在环境监测、微流控实验、细胞操作等领域会有很大潜力。
从“可动”到“可控”,从“可控”到“可编程”,这条路走了近40年。现在,一个能感知、会计算、可编程的微观机器人终于出现了。
声明:本文仅供学术交流,版权归原作者所有。如有错误或侵权,请联系更正或删除,欢迎留言探讨。