
在传统的弹簧驱动跳跃机器人设计中,研究者们长期致力于针对特定任务优化跳跃高度。为实现这一目标,多种创新设计应运而生,特别是采用非线性弹簧连杆机制来增加系统的弹性能量存储,进而提升跳跃高度。
然而,尽管这些设计在一定程度上提高了跳跃性能,但它们始终未能触及理论上的最大跳跃高度。原因在于,当弹簧能量尚未完全释放时,这些系统便已开始起跳,导致部分存储的弹性能量未能充分转化为重力势能,进而限制了跳跃高度的进一步提升。
▍最高跳跃 120 米!超出大本钟塔高度两倍
据探索前沿科技边界,传递前沿科技成果的X-robot投稿,前不久,来自英国曼彻斯特大学的研究团队对弹簧驱动跳跃机器人的能效难题进行了新的探索。经过细致的分析,研究团队发现能量转换效率低下主要归因于旋转质量和非悬挂质量所引发的惯性效应。这些质量在物理连杆系统中难以完全消除,成为了制约能效提升的关键因素。
为了克服这一难题,研究团队提出了一个能有效表征跳跃加速阶段能量转换特性的低阶模型,并据此提出了提升弹簧驱动跳跃机器人能效的实际解决方案——通过重新设计弹簧驱动跳跃机器人的结构来减少结构质量和转动惯量,同时确保结构满足强度和刚度要求。
通过创新的设计方法,这种策略显著减少了惯性效应对能量转换过程的干扰,从而极大地提升了弹簧驱动跳跃机器人的能源效率。对比之前机器人跳跃高度纪录的33米,采用此策略设计的新型机器人能够跃升至惊人的120米以上,甚至在月球低重力环境下,其跳跃高度可达到200米,这一高度超过了大本钟塔的两倍。这一突破性的进展为弹簧驱动跳跃机器人技术的发展提供了新的动力和方向。
该研究成果的相关论文以“Characterising the take-off dynamics and energy efficiency in spring-driven jumping robots”为题发表在《Mechanism and Machine Theory》杂志上。曼彻斯特大学流体与环境系John Lo为第一作者。
接下来,一起来和机器人大讲堂深入探索这一研究成果!
▍分析起跳模式,寻找设计优化理论支撑
为了提升弹簧驱动跳跃机器人的性能,研究人员深入分析了不同类型的起跳模式。他们将起跳模式划分为理想化起跳、过早起跳和延迟起跳三种,并通过棱柱连杆和旋转联动两种跳跃系统模型,详细探讨了这些起跳模式的成因。
在理想化起跳中,弹簧在自然长度时释放全部弹性势能,实现最佳能量转换。而过早起跳和延迟起跳,由于弹簧长度偏离自然长度,导致弹性势能未完全释放,进而降低能量转换效率。
为了深入理解延迟起跳,研究人员以一个由线性(胡克)弹簧驱动的棱柱跳跃系统模型为例分析了非弹簧质量和动力学以及能量效率的影响。该模型由一个集中的弹簧质量体(点B)和一个非弹簧的脚部质量(点F)组成,它们之间通过一个无质量的平移线性弹簧连接。这个弹簧具有一个刚度k和一个自然长度d,这个自然长度也被定义为该模型的特征长度。
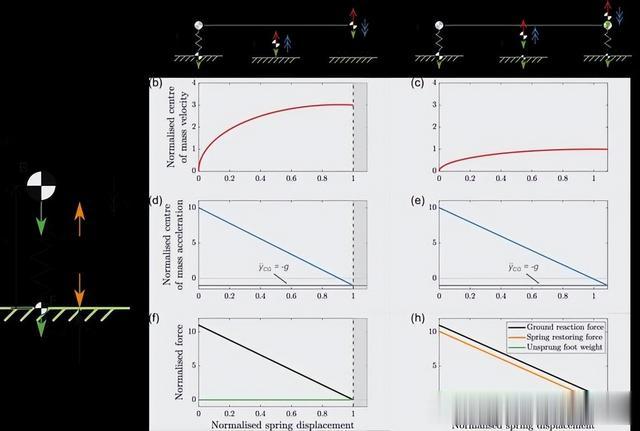
在模型与地面之间的机械接口中,起跳被定义为脚部失去与地面接触的时刻。系统的运动学特性通过身体位移y和系统质心位移yCG来捕捉;注意yCG = [mB/(mB+mF)]y,其中mB是身体的质量,mF是脚的质量。身体质量分数是身体质量与总系统质量之比,即mB/mT,其中mT = mB + mF。当身体质量分数为零时,所有的系统质量都位于非弹簧脚部,并且没有弹簧质量。相反,如果身体质量分数等于一,系统就没有任何脚部质量,这与此前研究中提出的理想棱柱模型相同。
棱柱连杆跳跃系统可以进一步解释为一个简化的多体系统,它通过平移弹簧驱动进行运动。这种模型虽然简单,但仍然适用于更复杂的机械系统,并能够说明跳跃动力学的基本概念。通过对该系统的分析,研究人员更好地理解了延迟起跳现象及其对能量转换效率的影响。
以一个由旋转弹簧驱动的旋转联动跳跃模型为例,研究人员亦对旋转质量在弹簧扭矩作用下的运动就起跳动作的效率和性能进行了分析研究。在旋转联动跳跃模型中,一个旋转质量(通常代表机器人的腿部或其它运动部件)被弹簧所驱动,该弹簧具有特定的刚度和自然长度。当系统从地面获得初始推力时,旋转质量开始加速旋转,并储存弹性势能。随着转速的增加,旋转质量产生的离心力也随之增大。离心力与旋转速度的平方成正比,而弹簧扭矩则与旋转角度的变化率成正比。
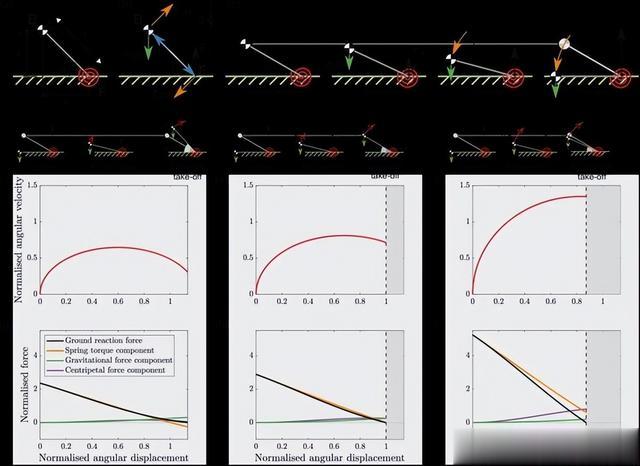
起跳时刻定义为旋转质量与地面脱离接触的时刻。理想情况下,起跳发生在所有存储的弹性势能完全转化为动能的时候,这被称为“理想化起跳”。然而,如果起跳发生得过早,即旋转质量在弹性势能尚未完全释放时就离地,这称为“过早起跳”,它会导致弹性-动能转换效率降低。另一方面,如果起跳发生得过晚,即旋转质量已经释放了过多的弹性势能才离地,这也不利于高效的能量转换。
为了实现理想的起跳,需要确保在地面反作用力减小到零的那一刻,重力分量与向心力分量相等。这种平衡状态可以保证所有的弹性势能都有效地转化为动能。此外,系统的总能量在加速阶段保持不变,等于最初存储在弹簧中的弹性势能。因此,在起跳过程中未转化的弹性势能以及各组成部分的动能被认为是效率低下的原因。
在实践中,旋转联动跳跃模型可能包含多个旋转质量,但基本原理保持一致。设计高效的弹簧驱动跳跃机器人需要考虑如何优化弹簧扭矩、控制旋转速度和调整各组成部分的质量分布以实现理想的起跳动作和高能量转换效率。
通过深入分析起跳模式,研究人员揭示了优化弹簧驱动跳跃机器人设计的关键要素。
▍开发多体动力学模型,探索耦合动力学效应
多体系统的跳跃动力学研究,专注于探究包含多个连接段和关节的物理跳跃系统的动力效应。相较于先前研究的弹簧驱动抽象棱柱和旋转模型,这类系统展现出更为复杂的动态行为。为了深入剖析这些耦合动力效应,并揭示能量效率不高的根源,研究人员精心构建了一个多体动力学模型。
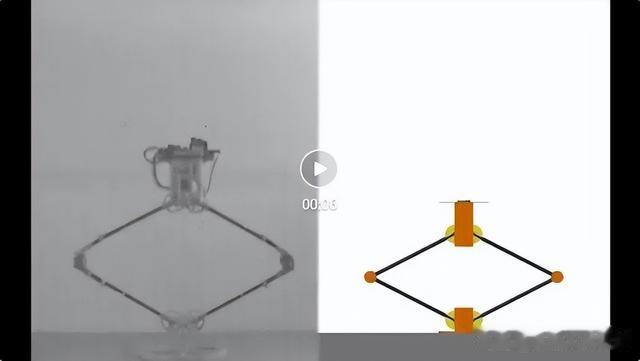
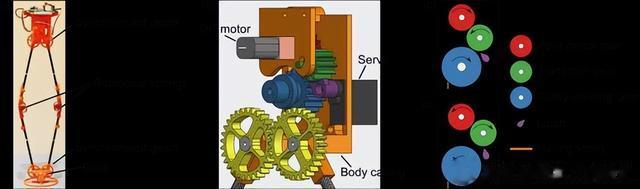
模型动力学为了验证该模型的有效性,研究人员采用了一个由菱形连杆和旋转弹簧组成的案例进行深入探究。这一旋转弹簧连杆系统包含四个刚性段,这些刚性段经由旋转关节紧密连接。菱形连杆作为一种在跳跃机器人设计中广泛应用的拓扑结构,凭借其独特的单一平移自由度(DoF)特性而备受瞩目。
研究人员之所以选择这一机制,不仅是因为它能为多体动力学研究提供清晰且直观的分析结果,更因为它能精准地反映当前跳跃机器人设计的核心理念。
在旋转关节处,研究人员精心设置了代表机械关节A、B、D和F质量的点质量米1、米4、米5和米8,同时还将旋转弹簧的质量纳入考量。在这些关节中,B代表机器人的主体部分,F作为系统与地面的接触点(例如机器人的脚部),而A和D则扮演着膝关节的角色。研究人员将段BA与FA之间的夹角定义为膝部角度,这一角度与旋转弹簧的角度完全吻合。
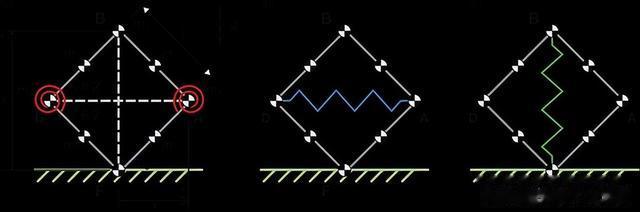
刚性段被设计为细长、质量均匀的梁,即米2、米3、米6和米7,它们都具有相同的长度,被称为大号。值得注意的是,大号恰好等于系统特征长度的一半。每根梁的质量中心都恰好位于其几何中心,而每根梁围绕其质量中心的惯性矩与其质量和长度的平方成正比。
在研究团队的模型中,不仅考虑了关节的质量,还纳入了节段的旋转惯性,因为这两者都会对起飞动力学产生显著影响。研究人员确定了从地面到关节B的垂直位移,该位移与局部的重力加速度方向相反。同时,他们还从节点B和F的初始位置开始,测量了水平方向的位移。通过这些参数,可以精确地描述关节B的平移位置、速度以及加速度。
跳跃状态在跳跃动态中,起跳条件受到多个力的综合影响,这些力分量共同决定了起跳的时机和效果。在起跳前的加速阶段,弹簧的恢复扭矩逐渐减小,而连杆的角度则在增大。这两个因素共同作用,使得τk d cos θ这一项逐渐减小。然而,弹簧扭矩在加速质点的同时,连杆角度的增加也导致了重力分量mBg sin 2θ和向心力分量mBdθ2 sinθ的增大。
值得注意的是,随着弹簧刚度的增加,恢复扭矩成分也会相应增大。但与此同时,角速度和向心力成分的增加更为显著。因此,在弹簧刚度增大的情况下,向心力项会在更小的位移处与扭矩项相抵消,从而导致起跳在较低的位移处就发生。这种提前的起跳现象会降低弹性势能与动能之间的转换效率,进而影响跳跃的高度和距离。
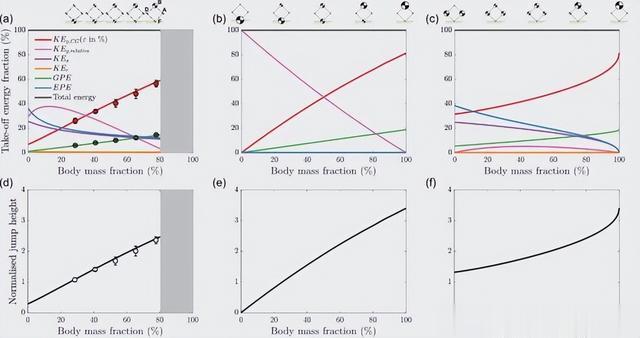
起跳和跳跃高度通过在系统中分配点质量,可以使用数值模型控制特定的动态效应以探索其对系统性能的影响。例如,当所有质量都集中在身体上时,身体质量分数为100%,能量效率上升到0.8。这意味着所有的弹簧能量在起跳前都被转换为系统的重心的重力势能和动能。这是在这种力重比和特征长度下理论上可实现的最大弹性-动能转换效率和标准化跳跃高度。
但是需要注意的是,由于起跳前弹性能量被转换为重力势能,所以弹性-动能转换效率小于1。然而,通过增加系统的力重比或减少系统的特征长度来减少起跳时的重力势能,可以进一步提高能量效率。
▍制作实验与数值模型,验证理论模型预测结果
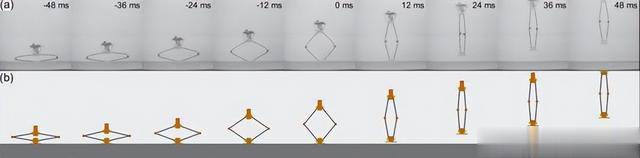
为验证理论模型预测的加速动力学,研究人员设计了一个独立跳跃系统实验。
实验模型是一个基于Matlab的ODE45求解器构建的动力学模型,专门用于预测跳跃机器人在加速阶段的行为。该模型能够全面模拟从充电准备到起飞状态(即t = 0ms时)及后续空中动作的整个跳跃过程。为确保模拟的精确性,研究人员设置了最大可变时间步长为10^-4秒。
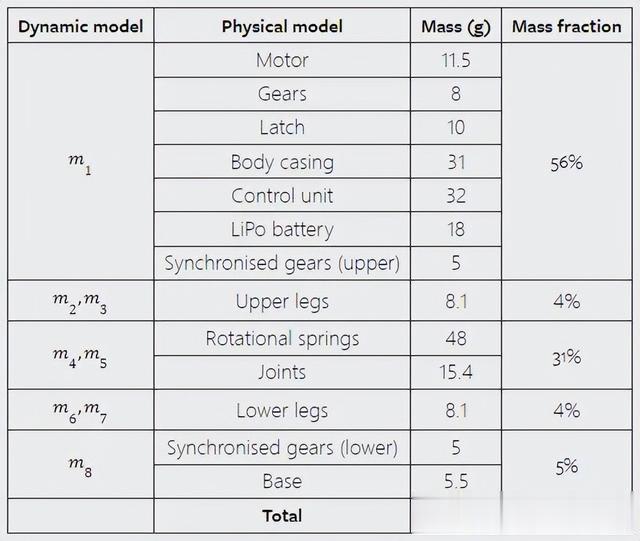
该模型的具体参数设定如下:长度L为0.15米,弹簧常数kr设定为0.7牛米/弧度,初始角度θini为178度,跳跃结束时的角度θend为25度。模型的质量分布如下图所示,并附有各部件质量及其占总质量的百分比。例如,电机部分重11.5克,占系统总质量的56%;控制单元和锂聚合物电池的质量分别为32克和18克,占总质量的3%和10%。整个系统总重205.6克,所有部件的质量比例总和恰好为100%。
为了验证ODE45求解结果的准确性,研究团队还开发了另一个基于Matlab Simulink(利用Simscape Multibody工具箱库)的数值多体动力学模型。该工具箱能够模拟在重力、惯性力矩以及弹簧驱动力和力矩综合作用下的跳跃和飞行动态。
在此模拟环境中,地面被固定在世界坐标系中,而脚与地面的接触力则被模拟为刚度为10^8牛米^-1的线性弹簧。多体模型的几何构型与表1所列的动态模型一致,并具备一个与重力矢量对齐的单一平移自由度,这是通过连接模型主体与地面的棱柱形关节来实现的。仿真过程采用了固定时间步长求解器(ODE14x),时间步长设定为10^-5秒,进一步减小时间步长对结果的影响微乎其微,变化率低于0.1%。
▍实验结果对比与验证
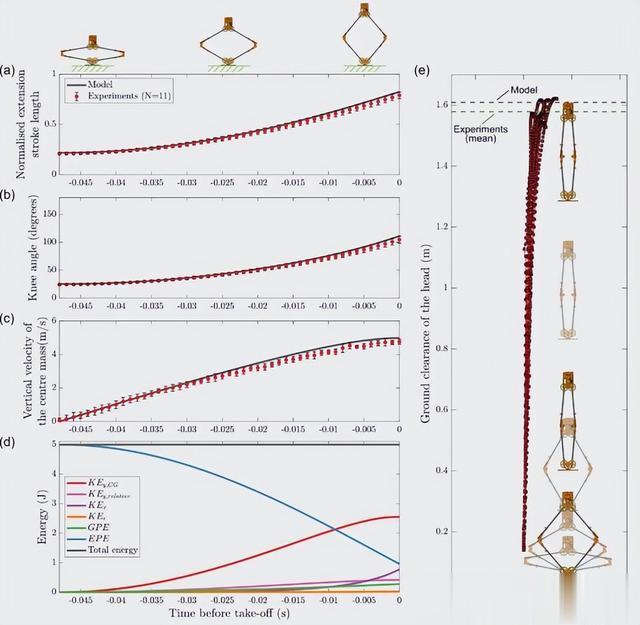
研究人员对实验模型的跳跃动力学结果进行了详尽的探讨,并与之前建立的数学模型和数值模型进行了对比。通过这一对比分析,他们详细阐述了发动机力和质量分布对多体弹道飞行器起飞动力学以及弹性动能转换效率的影响。
实验结果显示,尽管实验模型在起跳阶段展现出了与数值模型相一致的动态行为趋势,但实验数据揭示出实际的重心垂直起飞速度和弹性动能转换效率相对较低。这种差异主要源于模型中未能完全模拟的实际因素,如空气阻力、结构摩擦和物理基底的阻尼效应。
为了进一步探索质量分布对跳跃性能的影响,研究人员在实验模型中增加了额外的质量。实验与仿真结果均明确指出,随着身体质量分数的提高,能量转换效率和标准跳跃高度也随之显著提升。这一发现凸显了质量分布在跳跃动力学和整体性能中的关键作用。
为了深入理解质量分布和力重比对能量效率的具体影响,研究团队精心构建了两种概念模型:身体-足部模型和身体-膝盖模型。这些模型为研究人员提供了控制质量分布的工具,使他们能够系统地研究不同质量分布对起跳条件和跳跃动力学的影响。通过调整身体质量分数,他们发现,当质量更多地集中在机器人身体上时,能量效率和跳跃高度均出现了显著的增长。这一重要发现为优化跳跃机器人的设计提供了宝贵的指导。
除了质量分布外,研究团队还探讨了提高弹性动能转换效率的其他潜在方法,例如增加弹簧内储存的弹性势能。然而,数值模型的预测结果表明,单纯增加力重量比并非提升能量转换效率的有效手段,尤其是在考虑到弹簧和马达质量的增加时。相反,通过策略性地重新分配质量组件或进行结构优化,将质量集中在机器人主体上,被证明是一种更为高效的方法。
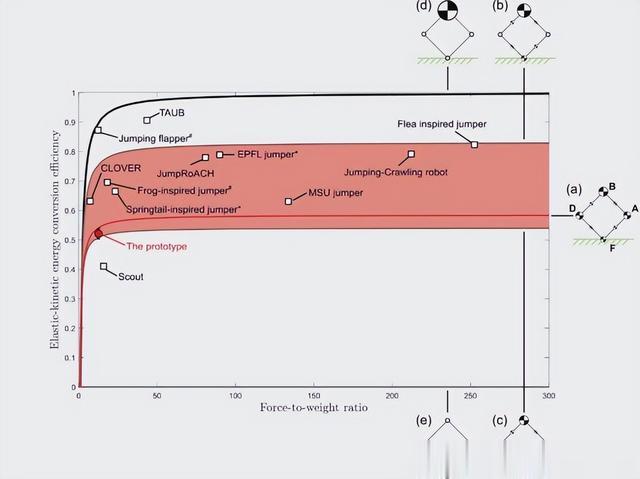
最后,研究人员将这些理论成果应用于现有的跳跃机器人技术中。他们对比了不同设计的跳跃高度,并预测了若消除惯性效应,这些机器人的跳跃性能将得到显著提升。这一分析不仅揭示了当前设计存在的性能瓶颈,更为未来的跳跃机器人设计指明了改进的方向。
▍关于X-robot
X-robot是中关村机器人产业创新中心与机器人大讲堂联手打造的权威性信息发布品牌专栏,集前沿探索、产业研究、知识普及于一体,致力于积极推动新质生产力的生成与发展,助力我国乃至全球机器人行业的蓬勃繁荣。X-robot立足国际化视野,通过全方位、多角度的挖掘与追踪,生动展现机器人前沿技术与尖端成果,为学术界、产业界及公众提供一个洞见未来、共享科技的重要窗口。
参考文章:
https://arxiv.org/html/2401.05554v1
