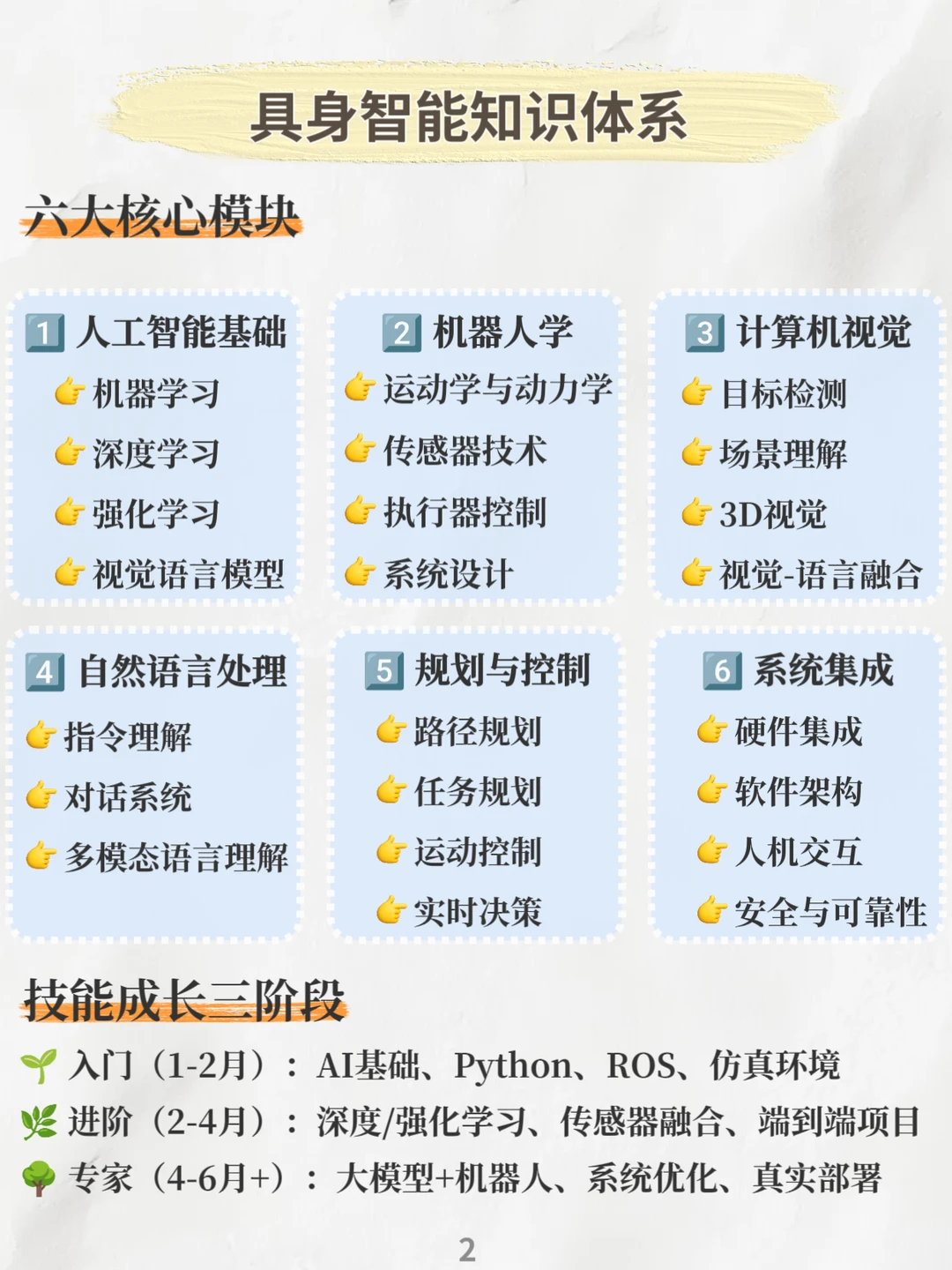
知识体系包含六大模块:人工智能基础(机器学习、深度学习、强化学习、大模型),机器人学(运动学、传感器、执行器),计算机视觉(检测、3D视觉、视觉语言融合),自然语言处理(指令理解、对话),规划与控制(路径、任务、运动规划),系统集成(硬件、软件、人机交互)。学习路径分三阶段:入门1-2月打好AI和ROS基础;进阶2-4月掌握深度/强化学习与传感器融合;专家4-6月+研究大模型+机器人及系统部署。
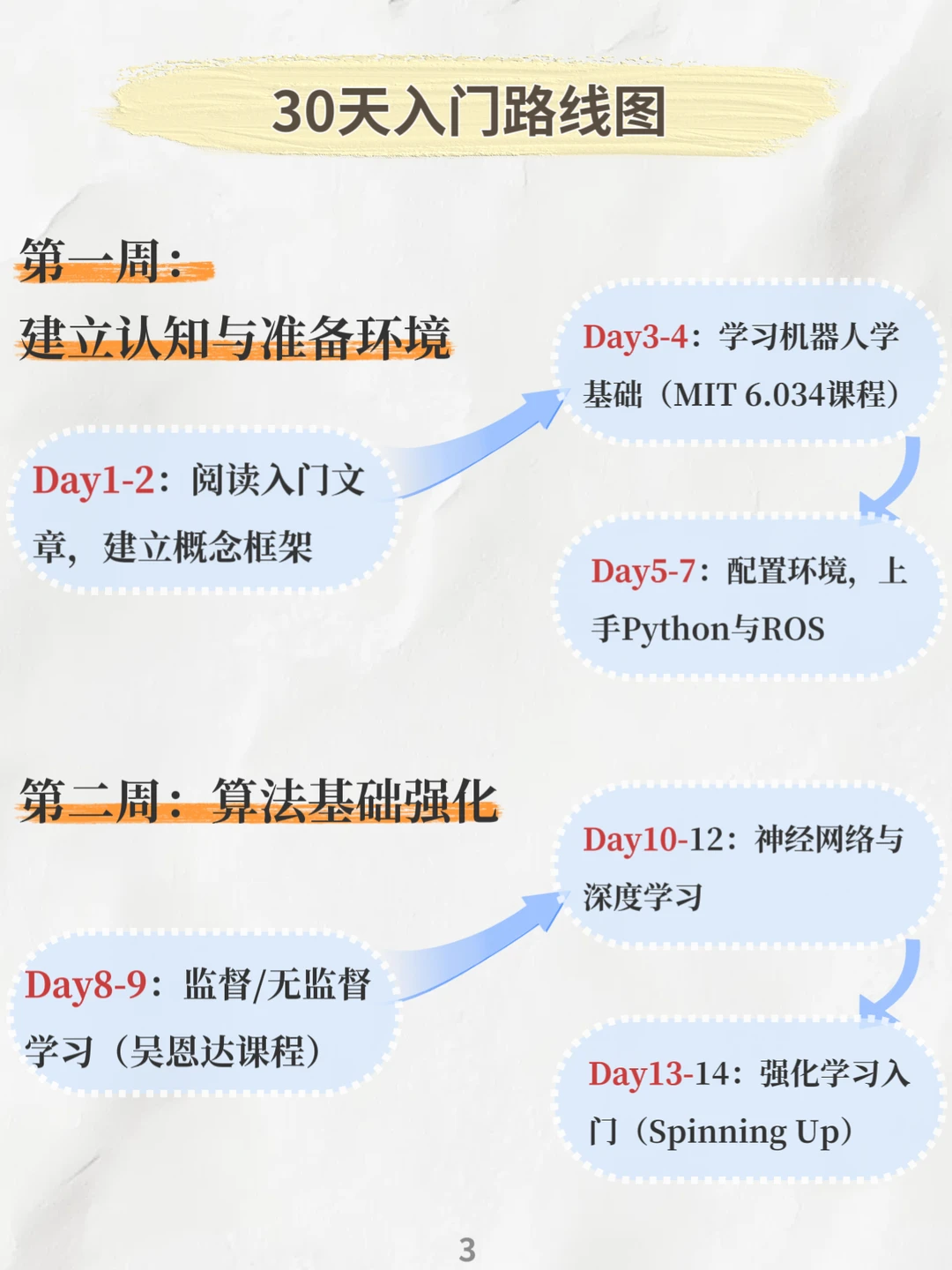
30天入门计划:第一周建立认知,了解机器人组成,配置Python/ROS环境;第二周学习监督/无监督学习、神经网络和强化学习基础;第三周专攻计算机视觉、ROS编程和多传感器融合;第四周进行仿真实践,完成一个完整避障或抓取项目,并阅读经典论文。
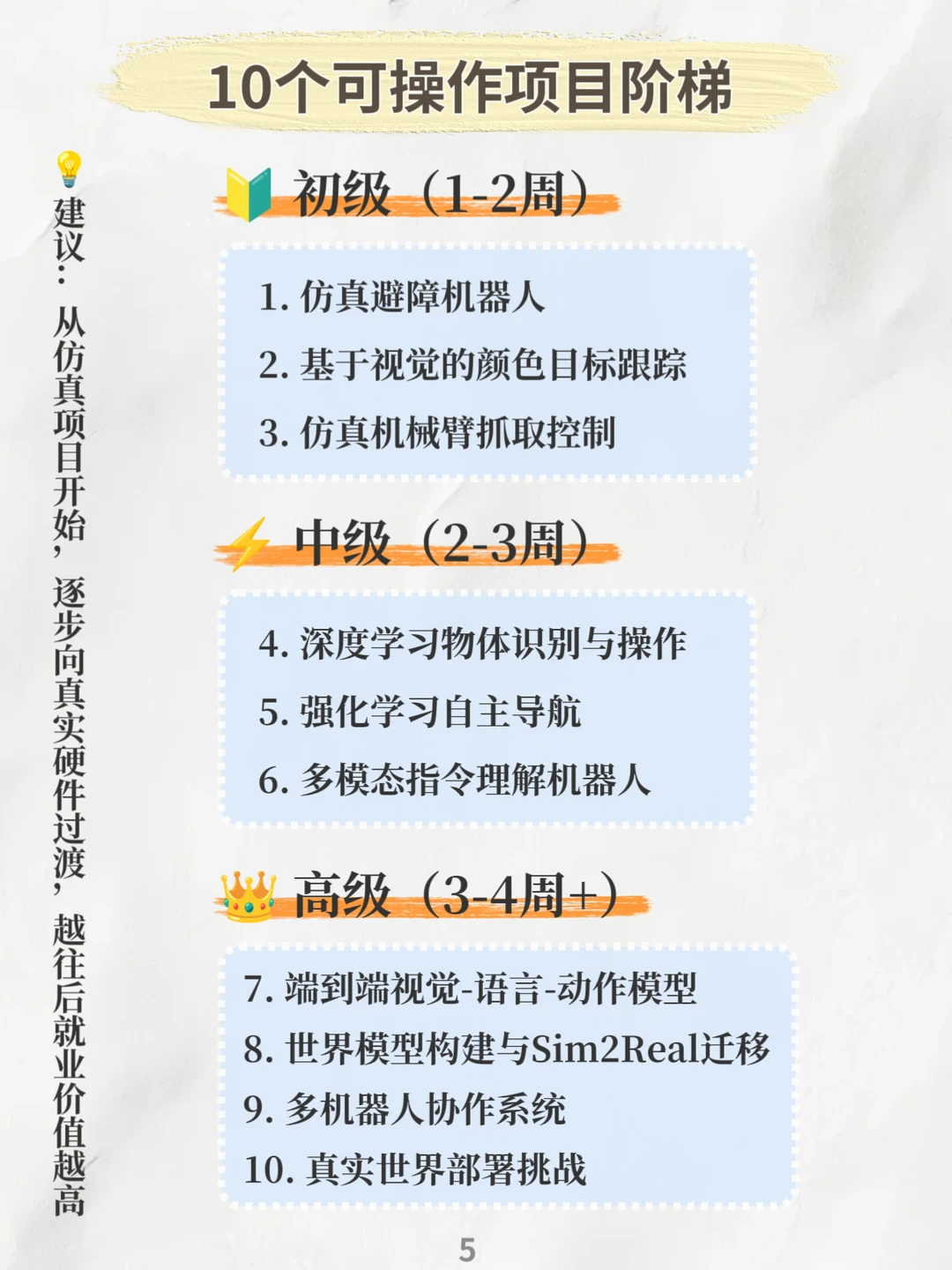
10个进阶实践项目:初级(1-2周)包括仿真避障、视觉颜色跟踪、仿真机械臂抓取;中级(2-3周)包括深度学习物体识别操作、强化学习导航、多模态指令理解;高级(3-4周+)包括端到端视觉-语言-动作模型、世界模型与Sim2Real、多机器人协作、真实世界部署。建议从仿真向真实硬件逐步过渡。
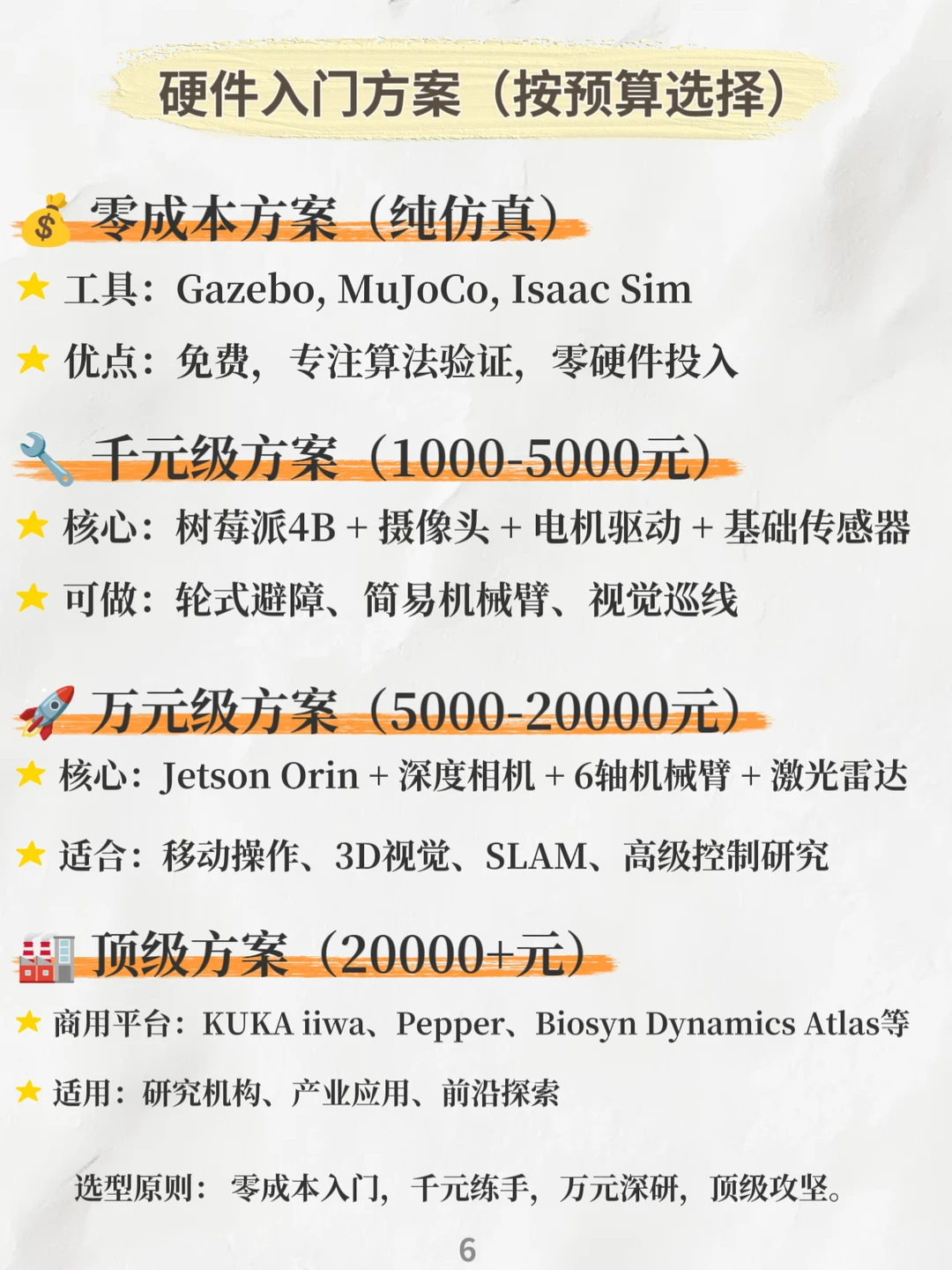
硬件方案按预算选择:零成本用Gazebo/MuJoCo等仿真;千元级(1000-5000元)配置树莓派+摄像头+电机驱动,搭建轮式机器人或简易机械臂;万元级(5000-20000元)采用Jetson Orin+深度相机+六轴机械臂+激光雷达,实现移动操作与SLAM;顶级方案(20000+)直接使用商用机器人平台如KUKA、Pepper等。
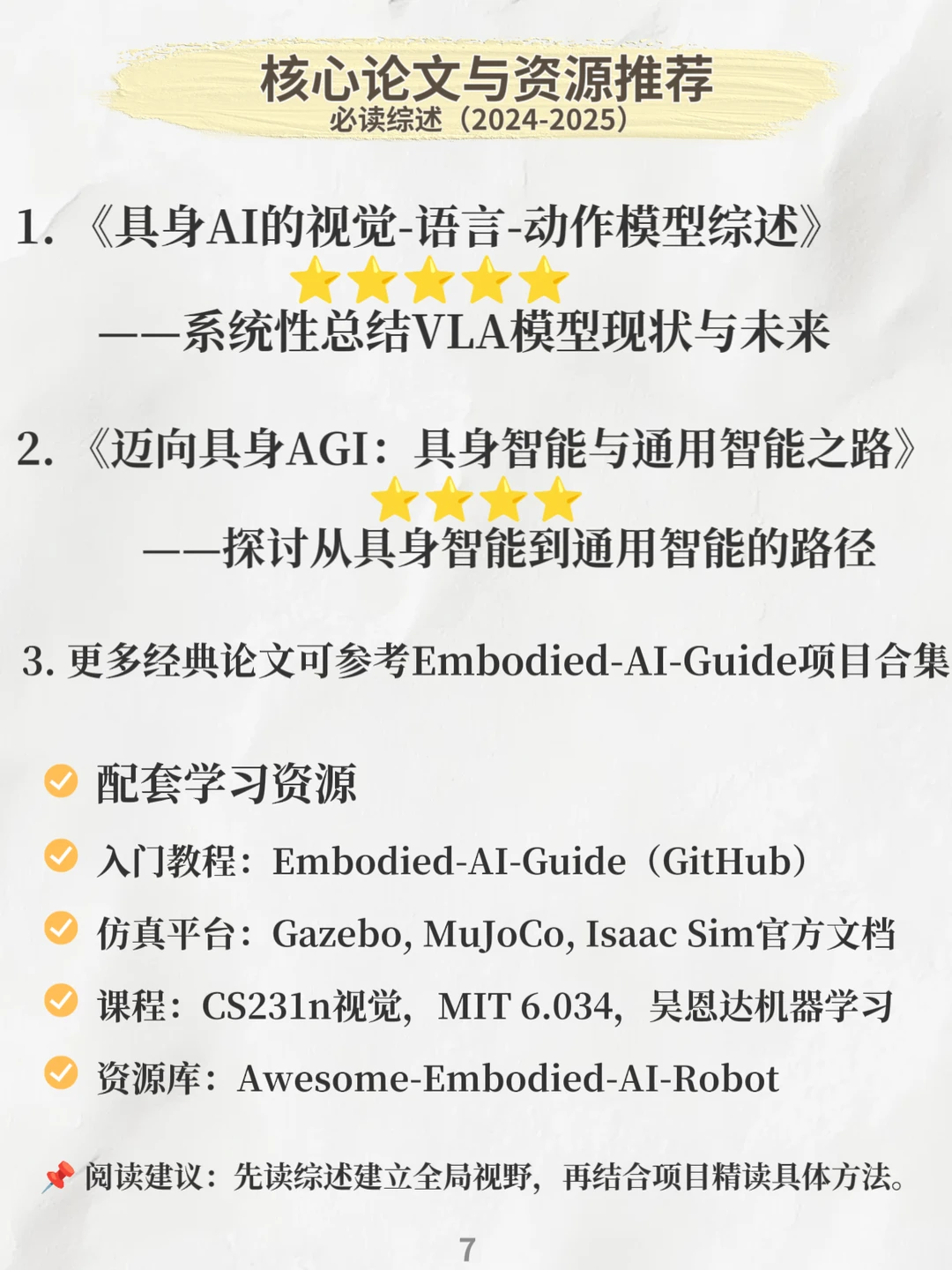
必读论文与资源:2024-2025年综述《具身AI的视觉-语言-动作模型综述》和《迈向具身AGI》必读;资源方面,GitHub上的Embodied-AI-Guide、Awesome-Embodied-AI-Robot项目,课程如CS231n、MIT 6.034、吴恩达机器学习,仿真平台Gazebo/MuJoCo官方文档都是极佳学习材料。
入门建议:先仿真后硬件,先复现后创新,从避障抓取逐步深入至多模态模型,坚持实践与论文结合。